GPS Location
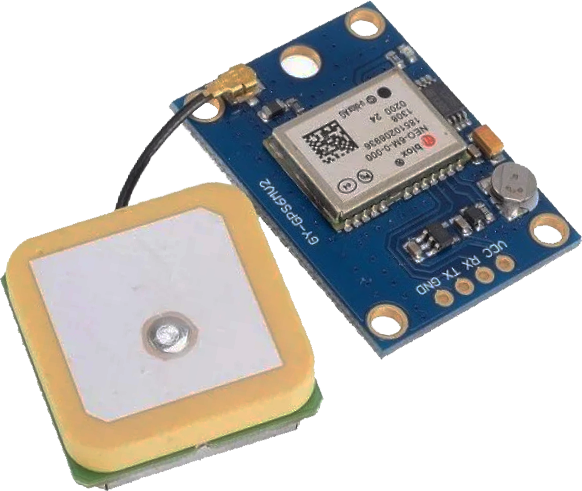
The GY-GPS6MV2 is a GPS module that provides location and time data. It's based on the UBX-M8030 KT chipset and communicates via serial UART, making it compatible with a wide range of microcontrollers, including the ESP32.
GY-GPS6MV2 GPS Module
The module outputs NMEA sentences, which are standardized text formats for GPS related data. The red LED on the module blinks when sufficient satellites are found to provide a position. NMEA sentences include:
- GPRMC (Recommended Minimum Specific GPS/Transit Data): Provides time, date, position, course, and speed information.
- GPVTG (Track Made Good and Ground Speed): Offers information about the ground speed and the course.
- GPGGA (Global Positioning System Fix Data): Delivers time, position, and fix related data of the GPS receiver.
- GPGSA (GPS DOP and Active Satellites): Shows the satellite status and the dilution of precision (DOP) values.
- GPGSV (GPS Satellites in View): Lists details of the satellites in view.
- GPGLL (Geographic Position - Latitude/Longitude): Provides latitude and longitude information.
Connecting GY-GPS6MV2 to ESP32
The GY-GPS6MV2 uses a serial communication interface. For connecting it to an ESP32, use the UART serial ports. The ESP32 Pins 16 (RX2) and 17 (TX2) are commonly used for this purpose. Here is a basic connection guide:
- VCC to 3.3V of ESP32
- GND to GND
- TX to Pin 16 (RX2) of ESP32
- RX to Pin 17 (TX2) of ESP32
import time
# Initialize UART for GPS
uart = UART(1, baudrate=9600, tx=Pin(17), rx=Pin(16))
fid = open('gps_data.txt','w')
st = time.time() # count for 100 sec
while ((time.time()-st)<100):
if uart.any():
gps_data = uart.readline()
print(gps_data)
fid.write(gps_data)
fid.close()
This Python script sets up a UART connection on the ESP32 and continuously reads the data output by the GY-GPS6MV2 module, displaying the raw NMEA sentences as comma separated values in the file gps_data.txt.
$GPVTG,,T,,M,0.441,N,0.817,K,D*29
$GPGGA,203752.00,4014.79161,N,11138.82414,W,2,09,0.94,1448.4,M,-18.8,M,,0000*51
$GPGSA,A,3,27,07,04,46,20,08,09,14,30,,,,1.96,0.94,1.72*04
$GPGSV,3,3,12,22,06,227,,27,30,059,38,30,38,292,24,46,40,205,38*77
$GPGLL,4014.79161,N,11138.82414,W,203752.00,A,D*77
These sentences are parsed to extract information like location coordinates, altitude, speed, and time. The * with a number is a CheckSum8 Xor verification of each line.
# Strip off the $ at the start and the * and the checksum at the end
content = nmea_sentence.strip()[1:nmea_sentence.find('*')]
# Initialize checksum
checksum = 0
# XOR each character to the previous one
for character in content:
checksum ^= ord(character)
# Return the checksum as a two-character hexadecimal string
return format(checksum, '02X')
# Sample NMEA sentences
nmea_sentences = [
"$GPRMC,203752.00,A,4014.79161,N,11138.82414,W,0.441,,191223,,,D*65",
"$GPVTG,,T,,M,0.441,N,0.817,K,D*29",
"$GPGGA,203752.00,4014.79161,N,11138.82414,W,2,09,0.94,1448.4,M,-18.8,M,,0000*51",
"$GPGSA,A,3,27,07,04,46,20,08,09,14,30,,,,1.96,0.94,1.72*04",
"$GPGSV,3,3,12,22,06,227,,27,30,059,38,30,38,292,24,46,40,205,38*77",
"$GPGLL,4014.79161,N,11138.82414,W,203752.00,A,D*77"
]
# Calculate and print checksums
for sentence in nmea_sentences:
print(f"{sentence}: Checksum = {calculate_checksum(sentence)}")
The result shows the same number after the * as the calculate_checksum() function.
$GPVTG,,T,,M,0.441,N,0.817,K,D*29: Checksum = 29
$GPGGA,203752.00,4014.79161,N,11138.82414,W,2,09,0.94,1448.4,M,-18.8,M,,0000*51: Checksum = 51
$GPGSA,A,3,27,07,04,46,20,08,09,14,30,,,,1.96,0.94,1.72*04: Checksum = 04
$GPGSV,3,3,12,22,06,227,,27,30,059,38,30,38,292,24,46,40,205,38*77: Checksum = 77
$GPGLL,4014.79161,N,11138.82414,W,203752.00,A,D*77: Checksum = 77
The sentences are saved to a file and are parsed to extract information such as Latitude and Longitude.
def parse_gga(sentence):
# Check if sentence is GGA
if not sentence.startswith('$GPGGA'):
return None
try:
parts = sentence.split(',')
# Get latitude and its direction (N/S)
latitude = parts[2]
lat_dir = parts[3]
# Convert latitude to decimal
lat_deg = float(latitude[:2])
lat_min = float(latitude[2:])
latitude = lat_deg + lat_min / 60.0
if lat_dir == 'S':
latitude *= -1
# Get longitude and its direction (E/W)
longitude = parts[4]
lon_dir = parts[5]
# Convert longitude to decimal
lon_deg = float(longitude[:3])
lon_min = float(longitude[3:])
longitude = lon_deg + lon_min / 60.0
if lon_dir == 'W':
longitude *= -1
return latitude, longitude
except Exception as e:
return None
fpos = open('gps_loc.txt','w')
fpos.write('Latitude,Longitude\n')
with open('gps_data.txt') as file:
for line in file:
position = parse_gga(line)
if position:
lat,long = position
print(lat,long)
fpos.write(str(lat)+','+str(long)+'\n')
fpos.close()
The result is that all of the $GPGGA lines are converted to Latitude and Longitude values in decimal format and saved to gps_loc.txt. The $GPGLL sentences also contain Latitude and Longitude information and could also be used to extract the decimal values.
40.246526833333334,-111.647069
40.2465285,-111.6470605
40.246528833333336,-111.64705183333334
40.2465285,-111.64704066666667
40.246527,-111.64702716666666
This code uses pandas to import the data and plotly express to display GPS data on an interactive map, similar to the Text Data Analysis tutorial. The gps_loc.txt file contains GPS location data with columns for latitude and longitude. The px.scatter_mapbox is used for plotting scatter plots on a mapbox map. It takes the DataFrame data as input and specifies the columns for latitude and longitude. The zoom parameter sets the zoom level of the map, with 18 at the local street level. The mapbox_style sets the style of the map to open-street-map as one of the built-in styles. The margin is set to 0 on all sides (r: right, t: top, l: left, b: bottom), to make the map fit tight in the output area without unnecessary padding.
import plotly.express as px
data = pd.read_csv('gps_loc.csv')
fig = px.scatter_mapbox(data, lat="Latitude",lon="Longitude",zoom=18)
fig.update_layout(mapbox_style="open-street-map",
margin={"r": 0, "t": 0, "l": 0, "b": 0})
fig.show()
As with typical GPS data, the GPS measured path deviates from the correct measured path. The best accuracy for GPS is within 3m while this example shows ~10m accuracy.
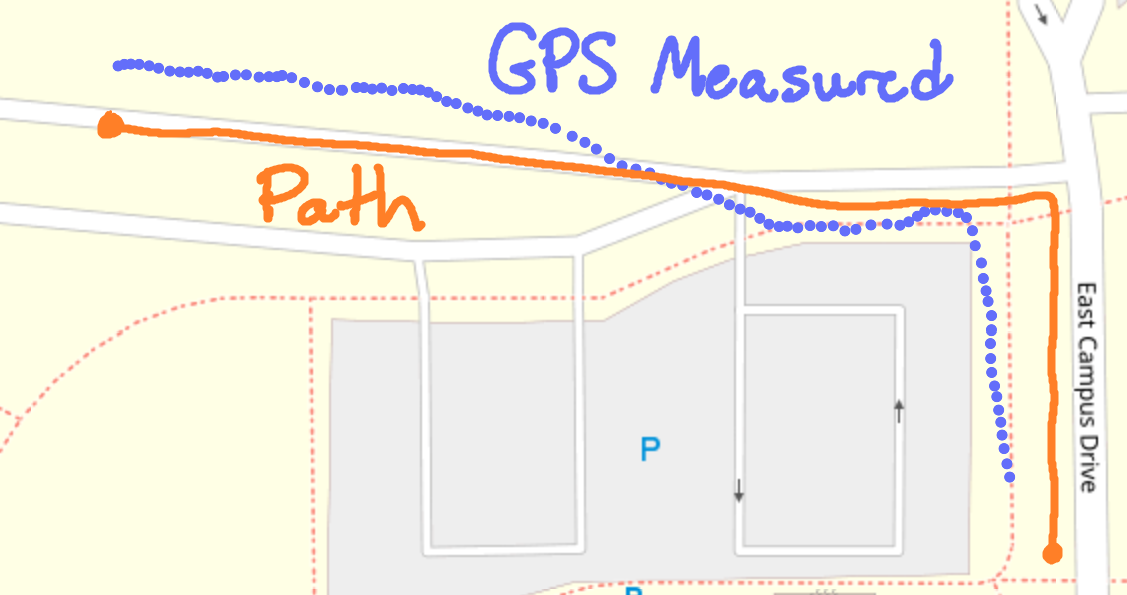
For higher accuracy, use a GPS device equipped with RTK (Real Time Kinematics) technology. GPS RTK uses standard signals from Global Navigation Satellite Systems (GNSS) with a correction data stream to attain a positional accuracy of up to 1cm. GNSS encompasses a network of satellites from various international sources, including the GPS system from the USA, GLONASS from Russia, Beidou from China, and Galileo from Europe.
✅ Activity: GPS Data Parsing and Application
Experiment with the GY-GPS6MV2 module and ESP32 by parsing the NMEA sentences for specific data like location, speed, and time with packages such as pynmeagps, nmea-parser, or micropyGPS (designed for microPython).
Data Parsing Example
Below is a simple example of the micropyGPS module to extract additional information from the NMEA sentences.
# MicropyGPS - a GPS NMEA sentence parser for Micropython/Python 3.X
# Copyright (c) 2017 Michael Calvin McCoy (calvin.mccoy@protonmail.com)
# The MIT License (MIT) - see LICENSE file
"""
from math import floor, modf
# Import utime or time for fix time handling
try:
# Assume running on MicroPython
import utime
except ImportError:
# Otherwise default to time module for non-embedded implementations
# Should still support millisecond resolution.
import time
class MicropyGPS(object):
"""GPS NMEA Sentence Parser. Creates object that stores all relevant GPS data and statistics.
Parses sentences one character at a time using update(). """
# Max Number of Characters a valid sentence can be (based on GGA sentence)
SENTENCE_LIMIT = 90
__HEMISPHERES = ('N', 'S', 'E', 'W')
__NO_FIX = 1
__FIX_2D = 2
__FIX_3D = 3
__DIRECTIONS = ('N', 'NNE', 'NE', 'ENE', 'E', 'ESE', 'SE', 'SSE', 'S', 'SSW', 'SW', 'WSW', 'W',
'WNW', 'NW', 'NNW')
__MONTHS = ('January', 'February', 'March', 'April', 'May',
'June', 'July', 'August', 'September', 'October',
'November', 'December')
def __init__(self, local_offset=0, location_formatting='ddm'):
"""
Setup GPS Object Status Flags, Internal Data Registers, etc
local_offset (int): Timzone Difference to UTC
location_formatting (str): Style For Presenting Longitude/Latitude:
Decimal Degree Minute (ddm) - 40° 26.767′ N
Degrees Minutes Seconds (dms) - 40° 26′ 46″ N
Decimal Degrees (dd) - 40.446° N
"""
#####################
# Object Status Flags
self.sentence_active = False
self.active_segment = 0
self.process_crc = False
self.gps_segments = []
self.crc_xor = 0
self.char_count = 0
self.fix_time = 0
#####################
# Sentence Statistics
self.crc_fails = 0
self.clean_sentences = 0
self.parsed_sentences = 0
#####################
# Logging Related
self.log_handle = None
self.log_en = False
#####################
# Data From Sentences
# Time
self.timestamp = [0, 0, 0.0]
self.date = [0, 0, 0]
self.local_offset = local_offset
# Position/Motion
self._latitude = [0, 0.0, 'N']
self._longitude = [0, 0.0, 'W']
self.coord_format = location_formatting
self.speed = [0.0, 0.0, 0.0]
self.course = 0.0
self.altitude = 0.0
self.geoid_height = 0.0
# GPS Info
self.satellites_in_view = 0
self.satellites_in_use = 0
self.satellites_used = []
self.last_sv_sentence = 0
self.total_sv_sentences = 0
self.satellite_data = dict()
self.hdop = 0.0
self.pdop = 0.0
self.vdop = 0.0
self.valid = False
self.fix_stat = 0
self.fix_type = 1
########################################
# Coordinates Translation Functions
########################################
@property
def latitude(self):
"""Format Latitude Data Correctly"""
if self.coord_format == 'dd':
decimal_degrees = self._latitude[0] + (self._latitude[1] / 60)
return [decimal_degrees, self._latitude[2]]
elif self.coord_format == 'dms':
minute_parts = modf(self._latitude[1])
seconds = round(minute_parts[0] * 60)
return [self._latitude[0], int(minute_parts[1]), seconds, self._latitude[2]]
else:
return self._latitude
@property
def longitude(self):
"""Format Longitude Data Correctly"""
if self.coord_format == 'dd':
decimal_degrees = self._longitude[0] + (self._longitude[1] / 60)
return [decimal_degrees, self._longitude[2]]
elif self.coord_format == 'dms':
minute_parts = modf(self._longitude[1])
seconds = round(minute_parts[0] * 60)
return [self._longitude[0], int(minute_parts[1]), seconds, self._longitude[2]]
else:
return self._longitude
########################################
# Logging Related Functions
########################################
def start_logging(self, target_file, mode="append"):
"""
Create GPS data log object
"""
# Set Write Mode Overwrite or Append
mode_code = 'w' if mode == 'new' else 'a'
try:
self.log_handle = open(target_file, mode_code)
except AttributeError:
print("Invalid FileName")
return False
self.log_en = True
return True
def stop_logging(self):
"""
Closes the log file handler and disables further logging
"""
try:
self.log_handle.close()
except AttributeError:
print("Invalid Handle")
return False
self.log_en = False
return True
def write_log(self, log_string):
"""Attempts to write the last valid NMEA sentence character to the active file handler
"""
try:
self.log_handle.write(log_string)
except TypeError:
return False
return True
########################################
# Sentence Parsers
########################################
def gprmc(self):
"""Parse Recommended Minimum Specific GPS/Transit data (RMC)Sentence.
Updates UTC timestamp, latitude, longitude, Course, Speed, Date, and fix status
"""
# UTC Timestamp
try:
utc_string = self.gps_segments[1]
if utc_string: # Possible timestamp found
hours = (int(utc_string[0:2]) + self.local_offset) % 24
minutes = int(utc_string[2:4])
seconds = float(utc_string[4:])
self.timestamp = [hours, minutes, seconds]
else: # No Time stamp yet
self.timestamp = [0, 0, 0.0]
except ValueError: # Bad Timestamp value present
return False
# Date stamp
try:
date_string = self.gps_segments[9]
# Date string printer function assumes to be year >=2000,
# date_string() must be supplied with the correct century argument to display correctly
if date_string: # Possible date stamp found
day = int(date_string[0:2])
month = int(date_string[2:4])
year = int(date_string[4:6])
self.date = (day, month, year)
else: # No Date stamp yet
self.date = (0, 0, 0)
except ValueError: # Bad Date stamp value present
return False
# Check Receiver Data Valid Flag
if self.gps_segments[2] == 'A': # Data from Receiver is Valid/Has Fix
# Longitude / Latitude
try:
# Latitude
l_string = self.gps_segments[3]
lat_degs = int(l_string[0:2])
lat_mins = float(l_string[2:])
lat_hemi = self.gps_segments[4]
# Longitude
l_string = self.gps_segments[5]
lon_degs = int(l_string[0:3])
lon_mins = float(l_string[3:])
lon_hemi = self.gps_segments[6]
except ValueError:
return False
if lat_hemi not in self.__HEMISPHERES:
return False
if lon_hemi not in self.__HEMISPHERES:
return False
# Speed
try:
spd_knt = float(self.gps_segments[7])
except ValueError:
return False
# Course
try:
if self.gps_segments[8]:
course = float(self.gps_segments[8])
else:
course = 0.0
except ValueError:
return False
# TODO - Add Magnetic Variation
# Update Object Data
self._latitude = [lat_degs, lat_mins, lat_hemi]
self._longitude = [lon_degs, lon_mins, lon_hemi]
# Include mph and hm/h
self.speed = [spd_knt, spd_knt * 1.151, spd_knt * 1.852]
self.course = course
self.valid = True
# Update Last Fix Time
self.new_fix_time()
else: # Clear Position Data if Sentence is 'Invalid'
self._latitude = [0, 0.0, 'N']
self._longitude = [0, 0.0, 'W']
self.speed = [0.0, 0.0, 0.0]
self.course = 0.0
self.valid = False
return True
def gpgll(self):
"""Parse Geographic Latitude and Longitude (GLL)Sentence. Updates UTC timestamp, latitude,
longitude, and fix status"""
# UTC Timestamp
try:
utc_string = self.gps_segments[5]
if utc_string: # Possible timestamp found
hours = (int(utc_string[0:2]) + self.local_offset) % 24
minutes = int(utc_string[2:4])
seconds = float(utc_string[4:])
self.timestamp = [hours, minutes, seconds]
else: # No Time stamp yet
self.timestamp = [0, 0, 0.0]
except ValueError: # Bad Timestamp value present
return False
# Check Receiver Data Valid Flag
if self.gps_segments[6] == 'A': # Data from Receiver is Valid/Has Fix
# Longitude / Latitude
try:
# Latitude
l_string = self.gps_segments[1]
lat_degs = int(l_string[0:2])
lat_mins = float(l_string[2:])
lat_hemi = self.gps_segments[2]
# Longitude
l_string = self.gps_segments[3]
lon_degs = int(l_string[0:3])
lon_mins = float(l_string[3:])
lon_hemi = self.gps_segments[4]
except ValueError:
return False
if lat_hemi not in self.__HEMISPHERES:
return False
if lon_hemi not in self.__HEMISPHERES:
return False
# Update Object Data
self._latitude = [lat_degs, lat_mins, lat_hemi]
self._longitude = [lon_degs, lon_mins, lon_hemi]
self.valid = True
# Update Last Fix Time
self.new_fix_time()
else: # Clear Position Data if Sentence is 'Invalid'
self._latitude = [0, 0.0, 'N']
self._longitude = [0, 0.0, 'W']
self.valid = False
return True
def gpvtg(self):
"""Parse Track Made Good and Ground Speed (VTG) Sentence. Updates speed and course"""
try:
course = float(self.gps_segments[1]) if self.gps_segments[1] else 0.0
spd_knt = float(self.gps_segments[5]) if self.gps_segments[5] else 0.0
except ValueError:
return False
# Include mph and km/h
self.speed = (spd_knt, spd_knt * 1.151, spd_knt * 1.852)
self.course = course
return True
def gpgga(self):
"""Parse Global Positioning System Fix Data (GGA) Sentence. Updates UTC timestamp, latitude, longitude,
fix status, satellites in use, Horizontal Dilution of Precision (HDOP), altitude, geoid height and fix status"""
try:
# UTC Timestamp
utc_string = self.gps_segments[1]
# Skip timestamp if receiver doesn't have on yet
if utc_string:
hours = (int(utc_string[0:2]) + self.local_offset) % 24
minutes = int(utc_string[2:4])
seconds = float(utc_string[4:])
else:
hours = 0
minutes = 0
seconds = 0.0
# Number of Satellites in Use
satellites_in_use = int(self.gps_segments[7])
# Get Fix Status
fix_stat = int(self.gps_segments[6])
except (ValueError, IndexError):
return False
try:
# Horizontal Dilution of Precision
hdop = float(self.gps_segments[8])
except (ValueError, IndexError):
hdop = 0.0
# Process Location and Speed Data if Fix is GOOD
if fix_stat:
# Longitude / Latitude
try:
# Latitude
l_string = self.gps_segments[2]
lat_degs = int(l_string[0:2])
lat_mins = float(l_string[2:])
lat_hemi = self.gps_segments[3]
# Longitude
l_string = self.gps_segments[4]
lon_degs = int(l_string[0:3])
lon_mins = float(l_string[3:])
lon_hemi = self.gps_segments[5]
except ValueError:
return False
if lat_hemi not in self.__HEMISPHERES:
return False
if lon_hemi not in self.__HEMISPHERES:
return False
# Altitude / Height Above Geoid
try:
altitude = float(self.gps_segments[9])
geoid_height = float(self.gps_segments[11])
except ValueError:
altitude = 0
geoid_height = 0
# Update Object Data
self._latitude = [lat_degs, lat_mins, lat_hemi]
self._longitude = [lon_degs, lon_mins, lon_hemi]
self.altitude = altitude
self.geoid_height = geoid_height
# Update Object Data
self.timestamp = [hours, minutes, seconds]
self.satellites_in_use = satellites_in_use
self.hdop = hdop
self.fix_stat = fix_stat
# If Fix is GOOD, update fix timestamp
if fix_stat:
self.new_fix_time()
return True
def gpgsa(self):
"""Parse GNSS DOP and Active Satellites (GSA) sentence. Updates GPS fix type, list of satellites used in
fix calculation, Position Dilution of Precision (PDOP), Horizontal Dilution of Precision (HDOP), Vertical
Dilution of Precision, and fix status"""
# Fix Type (None,2D or 3D)
try:
fix_type = int(self.gps_segments[2])
except ValueError:
return False
# Read All (up to 12) Available PRN Satellite Numbers
sats_used = []
for sats in range(12):
sat_number_str = self.gps_segments[3 + sats]
if sat_number_str:
try:
sat_number = int(sat_number_str)
sats_used.append(sat_number)
except ValueError:
return False
else:
break
# PDOP,HDOP,VDOP
try:
pdop = float(self.gps_segments[15])
hdop = float(self.gps_segments[16])
vdop = float(self.gps_segments[17])
except ValueError:
return False
# Update Object Data
self.fix_type = fix_type
# If Fix is GOOD, update fix timestamp
if fix_type > self.__NO_FIX:
self.new_fix_time()
self.satellites_used = sats_used
self.hdop = hdop
self.vdop = vdop
self.pdop = pdop
return True
def gpgsv(self):
"""Parse Satellites in View (GSV) sentence. Updates number of SV Sentences,the number of the last SV sentence
parsed, and data on each satellite present in the sentence"""
try:
num_sv_sentences = int(self.gps_segments[1])
current_sv_sentence = int(self.gps_segments[2])
sats_in_view = int(self.gps_segments[3])
except ValueError:
return False
# Create a blank dict to store all the satellite data from this sentence in:
# satellite PRN is key, tuple containing telemetry is value
satellite_dict = dict()
# Calculate Number of Satelites to pull data for and thus how many segment positions to read
if num_sv_sentences == current_sv_sentence:
# Last sentence may have 1-4 satellites; 5 - 20 positions
sat_segment_limit = (sats_in_view - ((num_sv_sentences - 1) * 4)) * 5
else:
sat_segment_limit = 20 # Non-last sentences have 4 satellites and thus read up to position 20
# Try to recover data for up to 4 satellites in sentence
for sats in range(4, sat_segment_limit, 4):
# If a PRN is present, grab satellite data
if self.gps_segments[sats]:
try:
sat_id = int(self.gps_segments[sats])
except (ValueError,IndexError):
return False
try: # elevation can be null (no value) when not tracking
elevation = int(self.gps_segments[sats+1])
except (ValueError,IndexError):
elevation = None
try: # azimuth can be null (no value) when not tracking
azimuth = int(self.gps_segments[sats+2])
except (ValueError,IndexError):
azimuth = None
try: # SNR can be null (no value) when not tracking
snr = int(self.gps_segments[sats+3])
except (ValueError,IndexError):
snr = None
# If no PRN is found, then the sentence has no more satellites to read
else:
break
# Add Satellite Data to Sentence Dict
satellite_dict[sat_id] = (elevation, azimuth, snr)
# Update Object Data
self.total_sv_sentences = num_sv_sentences
self.last_sv_sentence = current_sv_sentence
self.satellites_in_view = sats_in_view
# For a new set of sentences, we either clear out the existing sat data or
# update it as additional SV sentences are parsed
if current_sv_sentence == 1:
self.satellite_data = satellite_dict
else:
self.satellite_data.update(satellite_dict)
return True
##########################################
# Data Stream Handler Functions
##########################################
def new_sentence(self):
"""Adjust Object Flags in Preparation for a New Sentence"""
self.gps_segments = ['']
self.active_segment = 0
self.crc_xor = 0
self.sentence_active = True
self.process_crc = True
self.char_count = 0
def update(self, new_char):
"""Process a new input char and updates GPS object if necessary based on special characters ('$', ',', '*')
Function builds a list of received string that are validate by CRC prior to parsing by the appropriate
sentence function. Returns sentence type on successful parse, None otherwise"""
valid_sentence = False
# Validate new_char is a printable char
ascii_char = ord(new_char)
if 10 <= ascii_char <= 126:
self.char_count += 1
# Write Character to log file if enabled
if self.log_en:
self.write_log(new_char)
# Check if a new string is starting ($)
if new_char == '$':
self.new_sentence()
return None
elif self.sentence_active:
# Check if sentence is ending (*)
if new_char == '*':
self.process_crc = False
self.active_segment += 1
self.gps_segments.append('')
return None
# Check if a section is ended (,), Create a new substring to feed
# characters to
elif new_char == ',':
self.active_segment += 1
self.gps_segments.append('')
# Store All Other printable character and check CRC when ready
else:
self.gps_segments[self.active_segment] += new_char
# When CRC input is disabled, sentence is nearly complete
if not self.process_crc:
if len(self.gps_segments[self.active_segment]) == 2:
try:
final_crc = int(self.gps_segments[self.active_segment], 16)
if self.crc_xor == final_crc:
valid_sentence = True
else:
self.crc_fails += 1
except ValueError:
pass # CRC Value was deformed and could not have been correct
# Update CRC
if self.process_crc:
self.crc_xor ^= ascii_char
# If a Valid Sentence Was received and it's a supported sentence, then parse it!!
if valid_sentence:
self.clean_sentences += 1 # Increment clean sentences received
self.sentence_active = False # Clear Active Processing Flag
if self.gps_segments[0] in self.supported_sentences:
# parse the Sentence Based on the message type, return True if parse is clean
if self.supported_sentences[self.gps_segments[0]](self):
# Let host know that the GPS object was updated by returning parsed sentence type
self.parsed_sentences += 1
return self.gps_segments[0]
# Check that the sentence buffer isn't filling up with Garage waiting for the sentence to complete
if self.char_count > self.SENTENCE_LIMIT:
self.sentence_active = False
# Tell Host no new sentence was parsed
return None
def new_fix_time(self):
"""Updates a high resolution counter with current time when fix is updated. Currently only triggered from
GGA, GSA and RMC sentences"""
try:
self.fix_time = utime.ticks_ms()
except NameError:
self.fix_time = time.time()
#########################################
# User Helper Functions
# These functions make working with the GPS object data easier
#########################################
def satellite_data_updated(self):
"""
Checks if the all the GSV sentences in a group have been read, making satellite data complete
:return: boolean
"""
if self.total_sv_sentences > 0 and self.total_sv_sentences == self.last_sv_sentence:
return True
else:
return False
def unset_satellite_data_updated(self):
"""
Mark GSV sentences as read indicating the data has been used and future updates are fresh
"""
self.last_sv_sentence = 0
def satellites_visible(self):
"""
Returns a list of of the satellite PRNs currently visible to the receiver
:return: list
"""
return list(self.satellite_data.keys())
def time_since_fix(self):
"""Returns number of millisecond since the last sentence with a valid fix was parsed. Returns 0 if
no fix has been found"""
# Test if a Fix has been found
if self.fix_time == 0:
return -1
# Try calculating fix time using utime; if not running MicroPython
# time.time() returns a floating point value in secs
try:
current = utime.ticks_diff(utime.ticks_ms(), self.fix_time)
except NameError:
current = (time.time() - self.fix_time) * 1000 # ms
return current
def compass_direction(self):
"""
Determine a cardinal or inter-cardinal direction based on current course.
:return: string
"""
# Calculate the offset for a rotated compass
if self.course >= 348.75:
offset_course = 360 - self.course
else:
offset_course = self.course + 11.25
# Each compass point is separated by 22.5 degrees, divide to find lookup value
dir_index = floor(offset_course / 22.5)
final_dir = self.__DIRECTIONS[dir_index]
return final_dir
def latitude_string(self):
"""
Create a readable string of the current latitude data
:return: string
"""
if self.coord_format == 'dd':
formatted_latitude = self.latitude
lat_string = str(formatted_latitude[0]) + '° ' + str(self._latitude[2])
elif self.coord_format == 'dms':
formatted_latitude = self.latitude
lat_string = str(formatted_latitude[0]) + '° ' + str(formatted_latitude[1]) + "' " + str(formatted_latitude[2]) + '" ' + str(formatted_latitude[3])
else:
lat_string = str(self._latitude[0]) + '° ' + str(self._latitude[1]) + "' " + str(self._latitude[2])
return lat_string
def longitude_string(self):
"""
Create a readable string of the current longitude data
:return: string
"""
if self.coord_format == 'dd':
formatted_longitude = self.longitude
lon_string = str(formatted_longitude[0]) + '° ' + str(self._longitude[2])
elif self.coord_format == 'dms':
formatted_longitude = self.longitude
lon_string = str(formatted_longitude[0]) + '° ' + str(formatted_longitude[1]) + "' " + str(formatted_longitude[2]) + '" ' + str(formatted_longitude[3])
else:
lon_string = str(self._longitude[0]) + '° ' + str(self._longitude[1]) + "' " + str(self._longitude[2])
return lon_string
def speed_string(self, unit='kph'):
"""
Creates a readable string of the current speed data in one of three units
:param unit: string of 'kph','mph, or 'knot'
:return:
"""
if unit == 'mph':
speed_string = str(self.speed[1]) + ' mph'
elif unit == 'knot':
if self.speed[0] == 1:
unit_str = ' knot'
else:
unit_str = ' knots'
speed_string = str(self.speed[0]) + unit_str
else:
speed_string = str(self.speed[2]) + ' km/h'
return speed_string
def date_string(self, formatting='s_mdy', century='20'):
"""
Creates a readable string of the current date.
Can select between long format: Januray 1st, 2014
or two short formats:
11/01/2014 (MM/DD/YYYY)
01/11/2014 (DD/MM/YYYY)
:param formatting: string 's_mdy', 's_dmy', or 'long'
:param century: int delineating the century the GPS data is from (19 for 19XX, 20 for 20XX)
:return: date_string string with long or short format date
"""
# Long Format Januray 1st, 2014
if formatting == 'long':
# Retrieve Month string from private set
month = self.__MONTHS[self.date[1] - 1]
# Determine Date Suffix
if self.date[0] in (1, 21, 31):
suffix = 'st'
elif self.date[0] in (2, 22):
suffix = 'nd'
elif self.date[0] == (3, 23):
suffix = 'rd'
else:
suffix = 'th'
day = str(self.date[0]) + suffix # Create Day String
year = century + str(self.date[2]) # Create Year String
date_string = month + ' ' + day + ', ' + year # Put it all together
else:
# Add leading zeros to day string if necessary
if self.date[0] < 10:
day = '0' + str(self.date[0])
else:
day = str(self.date[0])
# Add leading zeros to month string if necessary
if self.date[1] < 10:
month = '0' + str(self.date[1])
else:
month = str(self.date[1])
# Add leading zeros to year string if necessary
if self.date[2] < 10:
year = '0' + str(self.date[2])
else:
year = str(self.date[2])
# Build final string based on desired formatting
if formatting == 's_dmy':
date_string = day + '/' + month + '/' + year
else: # Default date format
date_string = month + '/' + day + '/' + year
return date_string
# All the currently supported NMEA sentences
supported_sentences = {'GPRMC': gprmc, 'GLRMC': gprmc,
'GPGGA': gpgga, 'GLGGA': gpgga,
'GPVTG': gpvtg, 'GLVTG': gpvtg,
'GPGSA': gpgsa, 'GLGSA': gpgsa,
'GPGSV': gpgsv, 'GLGSV': gpgsv,
'GPGLL': gpgll, 'GLGLL': gpgll,
'GNGGA': gpgga, 'GNRMC': gprmc,
'GNVTG': gpvtg, 'GNGLL': gpgll,
'GNGSA': gpgsa,
}
import micropyGPS
import time
# Initialize GPS
gps = micropyGPS.MicropyGPS()
# Configure UART for GPS
uart = UART(1, baudrate=9600, tx=17, rx=16)
def update_gps():
if uart.any():
byte_data = uart.readline()
for char in byte_data:
gps.update(chr(char))
i = 0
while True:
update_gps()
# Check if a sentence has been parsed
if gps.clean_sentences > 0:
i+=1
print('---'+str(i)+'-'*15)
print(f'Fix Type (1=None, 2=2D, 3=3D): {gps.fix_type}')
print(f'Latitude: {gps.latitude_string()}')
print(f'Longitude: {gps.longitude_string()}')
print(f'Satellite count: {gps.satellites_in_view}')
print(f'Satellites visible: {gps.satellites_visible()}')
print(f"Altitude: {gps.altitude}m")
print(f'DOP (Accurate=1): H{gps.hdop}, V{gps.vdop}, P{gps.pdop}')
print(f"Speed: {gps.speed_string('mph')}")
# Update every second
time.sleep(1)
