Humidity and Temperature Sensors
Temperature and humidity are important environmental parameters in many applications such as home automation, weather monitoring, and agricultural systems. Two common sensors used for measuring these parameters are the DHT11 and DHT22. Both sensors are popular due to the ease of use and integration with microcontrollers like an Arduino or ESP32.
The DHT11 and DHT22 sensors provide digital output and can be interfaced with a microcontroller using a single data line with a built-in MicroPython package. They are widely used with Python and MicroPython due to the simplicity and cost.
Comparison: DHT11 vs. DHT22
Both the DHT11 and DHT22 are capable of measuring temperature and humidity, but they differ in terms of accuracy, range, and application suitability.
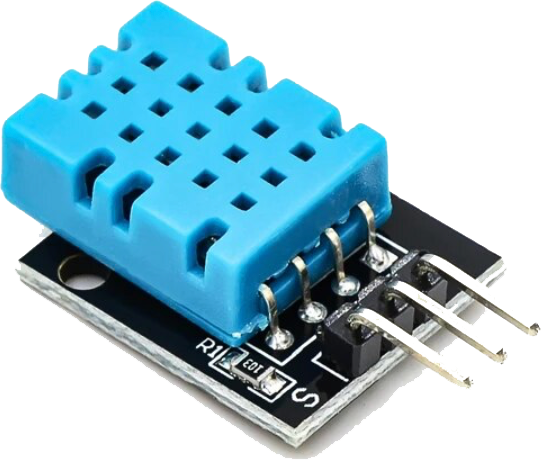
DHT11 Sensor
- Temperature Range: 0°C to 50°C
- Humidity Range: 20% to 80% RH
- Accuracy: ±2°C for temperature, ±5% RH for humidity
- Resolution: 1°C for temperature, 1% RH for humidity
- Advantages: Lower cost, suitable for basic applications where high accuracy is not critical.
- Disadvantages: Limited range and lower accuracy compared to DHT22.
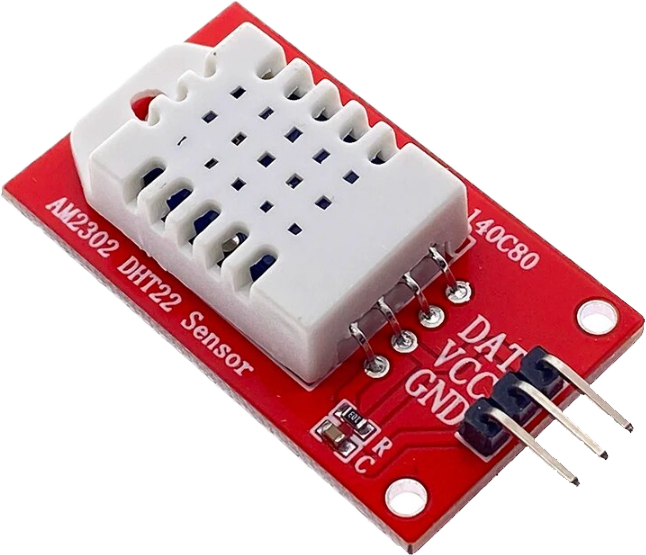
DHT22 Sensor
- Temperature Range: -40°C to 80°C
- Humidity Range: 0% to 100% RH
- Accuracy: ±0.5°C for temperature, ±2% RH for humidity
- Resolution: 0.1°C for temperature, 0.1% RH for humidity
- Advantages: Higher accuracy and wider range, making it suitable for more demanding applications.
- Disadvantages: Slightly higher cost compared to DHT11.
Additional Humidity Sensors
While DHT11 and DHT22 are popular choices, there are other sensors available that may be more suitable for specific applications.
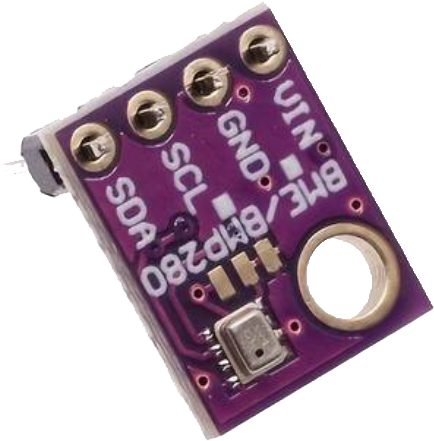
BME280: Temperature, humidity, and barometric pressure measurement. It has higher accuracy and stability compared to DHT sensors and communicates over I2C or SPI.
- Temperature Range: -40°C to 85°C
- Humidity Range: 0% to 100%
- Barometric Pressure Range: 300 hPa to 1100 hPa
- Accuracy: Temperature: ±1°C, Humidity: ±3%, Pressure: ±1 hPa
# This module is based on the below cited resources, which are all
# based on the documentation as provided in the Bosch Data Sheet and
# the sample implementation provided therein.
#
# Final Document: BST-BME280-DS002-15
#
# Authors: Paul Cunnane 2016, Peter Dahlebrg 2016
#
# This module borrows from the Adafruit BME280 Python library. Original
# Copyright notices are reproduced below.
#
# Those libraries were written for the Raspberry Pi. This modification is
# intended for the MicroPython and esp8266 boards.
#
# Copyright (c) 2014 Adafruit Industries
# Author: Tony DiCola
#
# Based on the BMP280 driver with BME280 changes provided by
# David J Taylor, Edinburgh (www.satsignal.eu)
#
# Based on Adafruit_I2C.py created by Kevin Townsend.
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
#
import time
from ustruct import unpack, unpack_from
from array import array
# BME280 default address.
BME280_I2CADDR = 0x76
# Operating Modes
BME280_OSAMPLE_1 = 1
BME280_OSAMPLE_2 = 2
BME280_OSAMPLE_4 = 3
BME280_OSAMPLE_8 = 4
BME280_OSAMPLE_16 = 5
BME280_REGISTER_CONTROL_HUM = 0xF2
BME280_REGISTER_STATUS = 0xF3
BME280_REGISTER_CONTROL = 0xF4
MODE_SLEEP = const(0)
MODE_FORCED = const(1)
MODE_NORMAL = const(3)
BME280_TIMEOUT = const(100) # about 1 second timeout
class BME280:
def __init__(self,
mode=BME280_OSAMPLE_8,
address=BME280_I2CADDR,
i2c=None,
**kwargs):
# Check that mode is valid.
if type(mode) is tuple and len(mode) == 3:
self._mode_hum, self._mode_temp, self._mode_press = mode
elif type(mode) == int:
self._mode_hum, self._mode_temp, self._mode_press = mode, mode, mode
else:
raise ValueError("Wrong type for the mode parameter, must be int or a 3 element tuple")
for mode in (self._mode_hum, self._mode_temp, self._mode_press):
if mode not in [BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,
BME280_OSAMPLE_8, BME280_OSAMPLE_16]:
raise ValueError(
'Unexpected mode value {0}. Set mode to one of '
'BME280_ULTRALOWPOWER, BME280_STANDARD, BME280_HIGHRES, or '
'BME280_ULTRAHIGHRES'.format(mode))
self.address = address
if i2c is None:
raise ValueError('An I2C object is required.')
self.i2c = i2c
self.__sealevel = 101325
# load calibration data
dig_88_a1 = self.i2c.readfrom_mem(self.address, 0x88, 26)
dig_e1_e7 = self.i2c.readfrom_mem(self.address, 0xE1, 7)
self.dig_T1, self.dig_T2, self.dig_T3, self.dig_P1, \
self.dig_P2, self.dig_P3, self.dig_P4, self.dig_P5, \
self.dig_P6, self.dig_P7, self.dig_P8, self.dig_P9, \
_, self.dig_H1 = unpack("<HhhHhhhhhhhhBB", dig_88_a1)
self.dig_H2, self.dig_H3, self.dig_H4,\
self.dig_H5, self.dig_H6 = unpack("<hBbhb", dig_e1_e7)
# unfold H4, H5, keeping care of a potential sign
self.dig_H4 = (self.dig_H4 * 16) + (self.dig_H5 & 0xF)
self.dig_H5 //= 16
# temporary data holders which stay allocated
self._l1_barray = bytearray(1)
self._l8_barray = bytearray(8)
self._l3_resultarray = array("i", [0, 0, 0])
self._l1_barray[0] = self._mode_temp << 5 | self._mode_press << 2 | MODE_SLEEP
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
self._l1_barray)
self.t_fine = 0
def read_raw_data(self, result):
""" Reads the raw (uncompensated) data from the sensor.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order
Returns:
None
"""
self._l1_barray[0] = self._mode_hum
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL_HUM,
self._l1_barray)
self._l1_barray[0] = self._mode_temp << 5 | self._mode_press << 2 | MODE_FORCED
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
self._l1_barray)
# Wait for conversion to complete
for _ in range(BME280_TIMEOUT):
if self.i2c.readfrom_mem(self.address, BME280_REGISTER_STATUS, 1)[0] & 0x08:
time.sleep_ms(10) # still busy
else:
break # Sensor ready
else:
raise RuntimeError("Sensor BME280 not ready")
# burst readout from 0xF7 to 0xFE, recommended by datasheet
self.i2c.readfrom_mem_into(self.address, 0xF7, self._l8_barray)
readout = self._l8_barray
# pressure(0xF7): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_press = ((readout[0] << 16) | (readout[1] << 8) | readout[2]) >> 4
# temperature(0xFA): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_temp = ((readout[3] << 16) | (readout[4] << 8) | readout[5]) >> 4
# humidity(0xFD): (msb << 8) | lsb
raw_hum = (readout[6] << 8) | readout[7]
result[0] = raw_temp
result[1] = raw_press
result[2] = raw_hum
def read_compensated_data(self, result=None):
""" Reads the data from the sensor and returns the compensated data.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order. You may use
this to read out the sensor without allocating heap memory
Returns:
array with temperature, pressure, humidity. Will be the one
from the result parameter if not None
"""
self.read_raw_data(self._l3_resultarray)
raw_temp, raw_press, raw_hum = self._l3_resultarray
# temperature
var1 = (raw_temp/16384.0 - self.dig_T1/1024.0) * self.dig_T2
var2 = raw_temp/131072.0 - self.dig_T1/8192.0
var2 = var2 * var2 * self.dig_T3
self.t_fine = int(var1 + var2)
temp = (var1 + var2) / 5120.0
temp = max(-40, min(85, temp))
# pressure
var1 = (self.t_fine/2.0) - 64000.0
var2 = var1 * var1 * self.dig_P6 / 32768.0 + var1 * self.dig_P5 * 2.0
var2 = (var2 / 4.0) + (self.dig_P4 * 65536.0)
var1 = (self.dig_P3 * var1 * var1 / 524288.0 + self.dig_P2 * var1) / 524288.0
var1 = (1.0 + var1 / 32768.0) * self.dig_P1
if (var1 == 0.0):
pressure = 30000 # avoid exception caused by division by zero
else:
p = ((1048576.0 - raw_press) - (var2 / 4096.0)) * 6250.0 / var1
var1 = self.dig_P9 * p * p / 2147483648.0
var2 = p * self.dig_P8 / 32768.0
pressure = p + (var1 + var2 + self.dig_P7) / 16.0
pressure = max(30000, min(110000, pressure))
# humidity
h = (self.t_fine - 76800.0)
h = ((raw_hum - (self.dig_H4 * 64.0 + self.dig_H5 / 16384.0 * h)) *
(self.dig_H2 / 65536.0 * (1.0 + self.dig_H6 / 67108864.0 * h *
(1.0 + self.dig_H3 / 67108864.0 * h))))
humidity = h * (1.0 - self.dig_H1 * h / 524288.0)
# humidity = max(0, min(100, humidity))
if result:
result[0] = temp
result[1] = pressure
result[2] = humidity
return result
return array("f", (temp, pressure, humidity))
@property
def sealevel(self):
return self.__sealevel
@sealevel.setter
def sealevel(self, value):
if 30000 < value < 120000: # just ensure some reasonable value
self.__sealevel = value
@property
def altitude(self):
'''
Altitude in m.
'''
from math import pow
try:
p = 44330 * (1.0 - pow(self.read_compensated_data()[1] /
self.__sealevel, 0.1903))
except:
p = 0.0
return p
@property
def dew_point(self):
"""
Compute the dew point temperature for the current Temperature
and Humidity measured pair
"""
from math import log
t, p, h = self.read_compensated_data()
h = (log(h, 10) - 2) / 0.4343 + (17.62 * t) / (243.12 + t)
return 243.12 * h / (17.62 - h)
@property
def values(self):
""" human readable values """
t, p, h = self.read_compensated_data()
return ("{:.2f}C".format(t), "{:.2f}hPa".format(p/100),
"{:.2f}%".format(h))
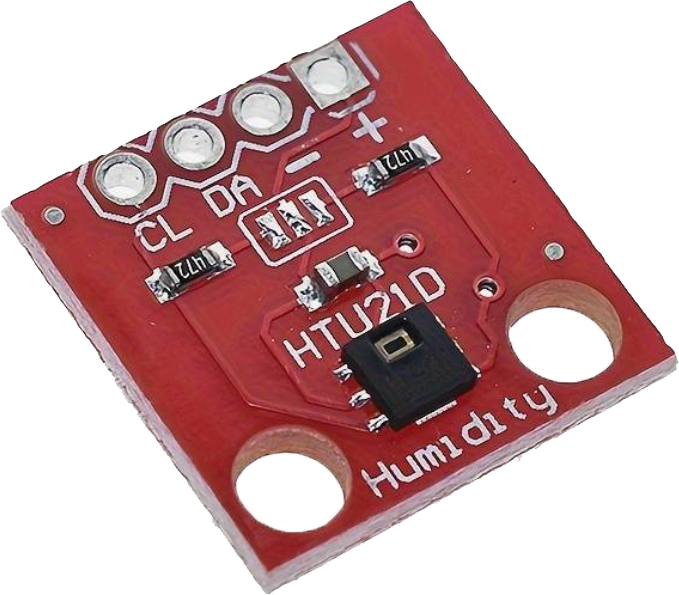
HTU21D: Digital humidity sensor with temperature output, providing high accuracy and low power consumption, communicating via I2C.
- Temperature Range: -40°C to 125°C
- Humidity Range: 0% to 100%
- Accuracy: Temperature: ±0.3°C, Humidity: ±2%

SHT31: Accurate, low-power sensor that measures both temperature and humidity, communicating via I2C or SPI.
- Temperature Range: -40°C to 125°C
- Humidity Range: 0% to 100%
- Accuracy: Temperature: ±0.3°C, Humidity: ±2%
Implementing DHT Sensors with MicroPython
To integrate DHT11 or DHT22 sensors with an ESP32 using MicroPython, the process involves connecting the sensor to the Arduino or ESP32, and using the dht MicroPython library to read the data.
import dht
# Example for DHT11 or DHT22
#sensor = dht.DHT11(Pin(2))
sensor = dht.DHT22(Pin(2))
sensor.measure()
temp = sensor.temperature()
hum = sensor.humidity()
print('Temperature:', temp, 'C')
print('Humidity:', hum, '%')
The choice between DHT11 and DHT22 depends on the specific requirements of a project, considering factors like accuracy, range, and cost. Alternatives like BME280 or SHT31 offer enhanced features and may be more suitable for other applications.
✅ Activity: Environmental Monitoring
Applications of a temperature and humidity sensor include:
- Home Automation: Use the sensor to monitor and control temperature and humidity in home automation systems, such as smart thermostats or humidifiers.
- Weather Stations: Incorporate the sensor in DIY weather stations to track local weather conditions.
- Agricultural Monitoring: Employ the sensor to monitor temperature and humidity in greenhouses, optimizing conditions for plant growth.
- Data Logging: Use the sensor for environmental data logging in various scientific research projects or environmental studies.
Use one of the sensors to gain insights into the environmental conditions of an office workplace throughout the day. Discuss the accuracy and resolution of the measurements and what they reveal about the environment.
Collect Data with DHT11
Use the following script to collect humidity and temperature data over a 16 hour period with MicroPython. The script records the digital values from the DHT11 every 40 seconds. Adjust time period and cycles as desired.
import dht
import time
# Example for DHT11 or DHT22
sensor = dht.DHT11(Pin(2))
with open('env_data.csv','w') as fid:
fid.write('Time,Temp,Humidity\n')
st = time.time()
# run for 16 hours
for i in range(1440):
sensor.measure()
temp = sensor.temperature()
hum = sensor.humidity()
with open('env_data.csv','a') as fid:
fid.write(f'{(time.time()-st)/60.0},{temp},{hum}\n')
print(f'{i} T:{temp}C H:{hum}%')
# Wait 40 sec before reading again
time.sleep(40)
Collect Data with BME280
Use the following script to collect humidity and temperature data over a 16 hour period with MicroPython. The script records the digital values from the BME280 every 40 seconds. Use the BME280 library posted above in with sensor descriptions. Adjust time period and cycles as desired.
import bme280
import time
# Create an I2C bus object
i2c = SoftI2C(scl=Pin(22), sda=Pin(21))
# Create a BME280 object
sensor = bme280.BME280(i2c=i2c)
with open('env_data.csv', 'w') as fid:
fid.write('Time,Temp,Humidity,Pressure\n')
st = time.time()
# Run for 16 hours
for i in range(1440):
temp_c, press_pa, hum = sensor.read_compensated_data()
with open('env_data.csv', 'a') as fid:
fid.write(f'{(time.time()-st)/60.0},{temp_c},{hum},{press_pa/1000}\n')
print(f'{i} T:{temp_c}C H:{hum}% P:{press_pa/1000}kPa')
# Wait 40 sec before reading again
time.sleep(40)
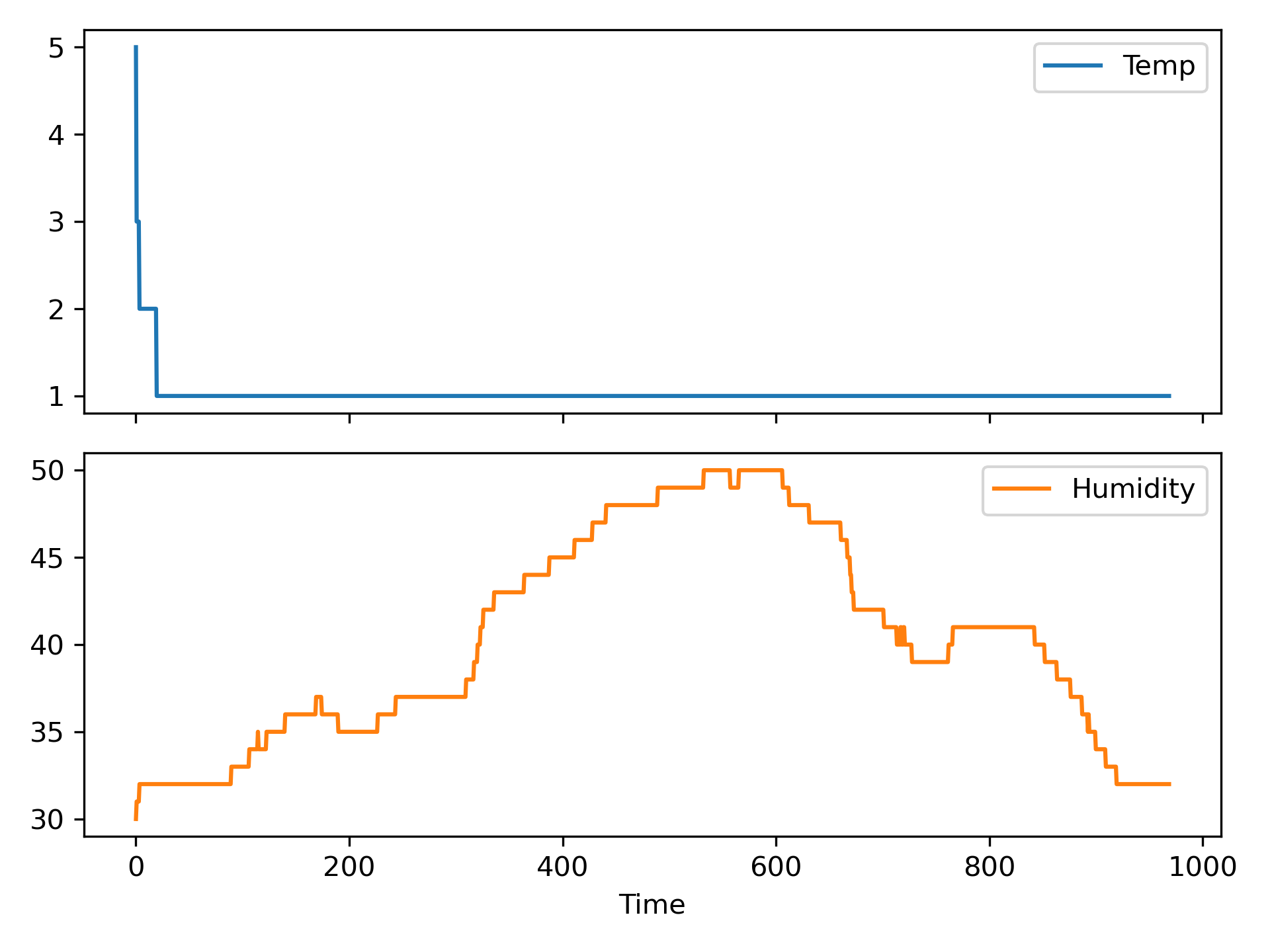
DHT11 Data Sample
The first sample data set is from 6 Jan 2024 with the DHT11 outside during a winter storm in Provo, Utah. The DHT11 sensor temperature range is 0°C to 50°C and the lower temperature limit is reached when it reports 1°C. The temperature descends below that value, but the sensor is not capable of reading lower and saturates. DHT22, BME280, HTU21D, and SHT31 sensors can read temperature values down to -40°C.

import matplotlib.pyplot as plt
file = 'env_data.csv'
url = 'http://apmonitor.com/dde/uploads/Main/'
data = pd.read_csv(url+file)
data.set_index('Time',drop=True,inplace=True)
data.plot(subplots=True)
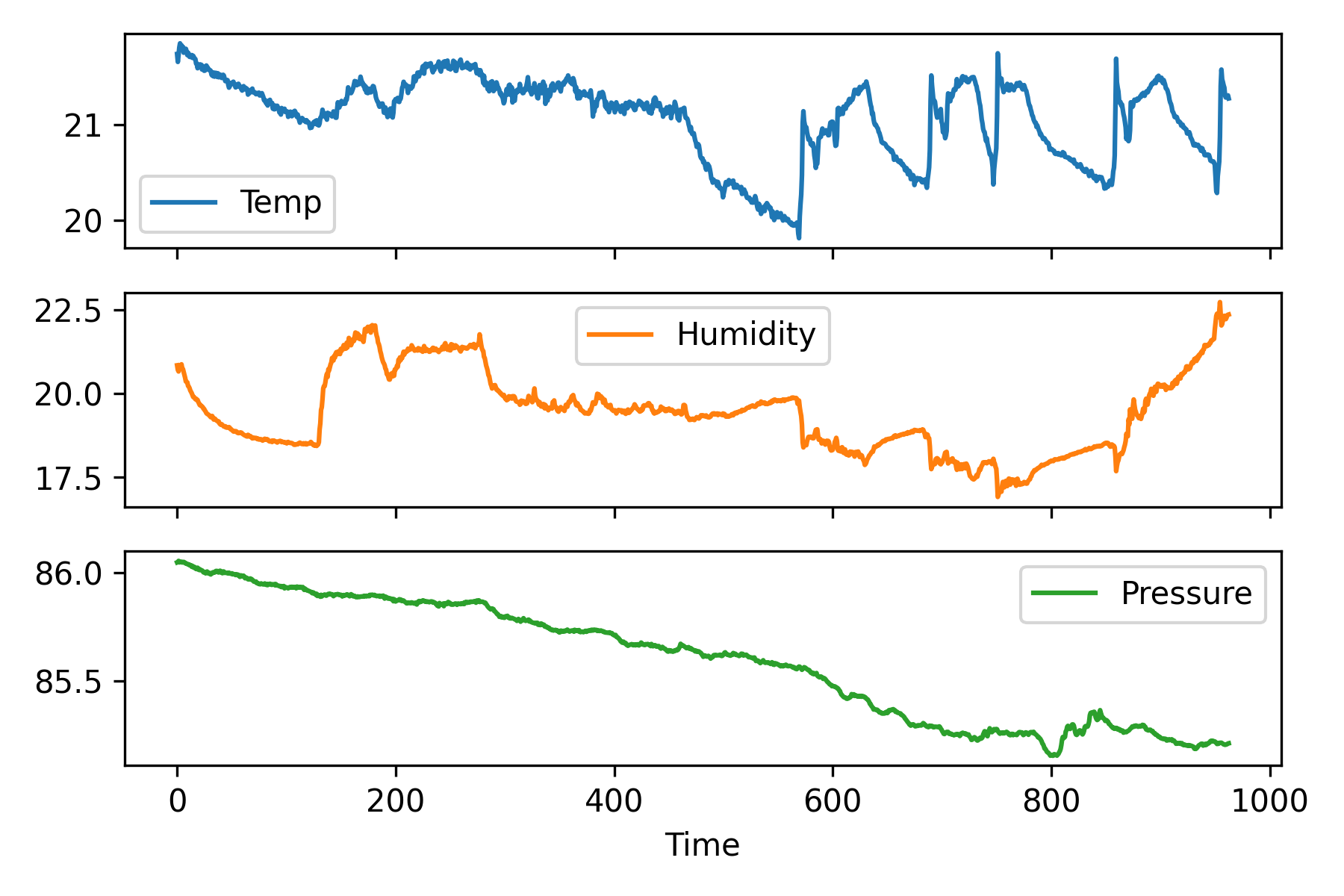
BME280 Data Sample
The second sample data set is from 16 Jan 2024 with the BME280 inside an office during a winter storm in Provo, Utah.
import matplotlib.pyplot as plt
file = 'env_data2.csv'
url = 'http://apmonitor.com/dde/uploads/Main/'
data = pd.read_csv(url+file)
data.set_index('Time',drop=True,inplace=True)
data.plot(subplots=True)
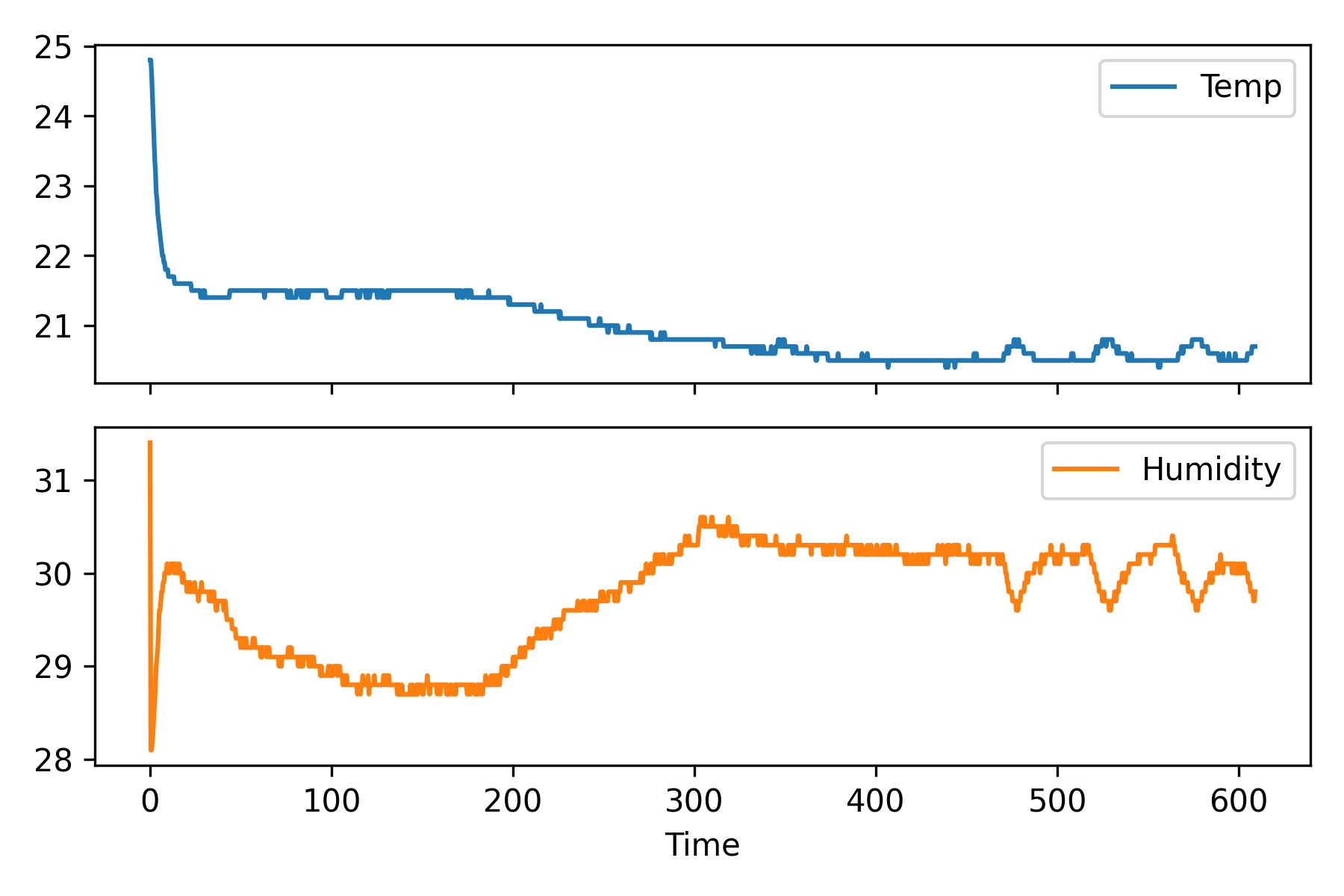
DHT22 Data Sample
The third sample data set is from 17 Jan 2024 with the DHT22 inside an office.
import matplotlib.pyplot as plt
file = 'env_data3.csv'
url = 'http://apmonitor.com/dde/uploads/Main/'
data = pd.read_csv(url+file)
data.set_index('Time',drop=True,inplace=True)
data.plot(subplots=True)