Air Pressure BMP280



Autonomous navigation requires a variety of sensors to create an estimate of absolute or relative position. Each sensor has relative strengths and weaknesses and sensor fusion ties the information together to create a current best estimate of position. Pressure is commonly used in cell phones, watches, drones, and other electronics to determine change in elevation. The barometric pressure varies slowly with weather patterns so absolute altitude needs a reference such as GPS or a barometric pressure reading at a known altitude.
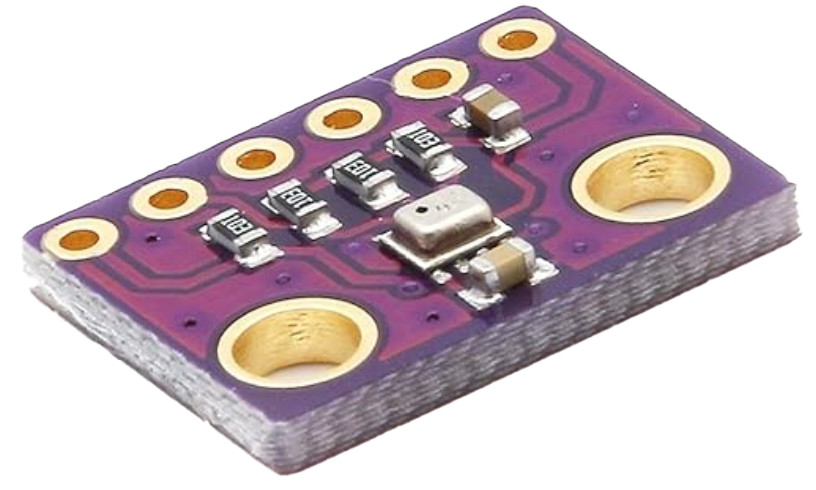
BMP280 Air Pressure Sensor
The BMP280 is a digital sensor that measures temperature and atmospheric pressure. It is a small, low-power device that can be easily integrated into a variety of applications, including weather stations, altitude measurement systems, and indoor air quality monitoring systems.
The BMP280 measures temperature using a built-in temperature sensor and atmospheric pressure using a piezoresistive pressure sensor. It is 0.95mm x 2mm x 2.5mm in size and also includes temperature. The BME280 adds humidity as well. The temperature sensor has a measurement range of -40°C to +85°C and an accuracy of ±1°C. The pressure sensor has a measurement range of 300 hPa to 1100 hPa and an accuracy of ±1 hPa.
One of the main advantages of the BMP280 is the low power consumption, which makes it suitable for use in battery-powered devices. It can operate at a supply voltage of 1.8V to 3.6V and has a sleep mode that can be used to reduce power consumption when the device is not in use. The BMP280 can communicate with a microcontroller or other digital device using standard communication protocols such as I2C (inter-integrated circuit) or SPI (serial peripheral interface).
The BMP280 is widely used in a variety of applications that require accurate measurement of temperature and atmospheric pressure. Some examples include weather stations, altitude measurement systems, and indoor air quality monitoring systems. It is a popular choice for these applications due to its small size, low power consumption, and high accuracy.

BMP280 Sensor Physics
The BMP280 has a piezoresistive sensor, a that leverages the piezoresistive effect to measure pressure. This effect occurs when the electrical resistance of a material changes in response to mechanical stress in response to changes in atmospheric pressure. The sensor is constructed with a diaphragm made from a piezoresistive material with a silicon semiconductor. It deforms slightly when atmospheric pressure is applied to this diaphragm.
This deformation alters the electrical conductivity of the silicon. The deformation changes the band structure of the semiconductor material, affecting the mobility of charge carriers (electrons and holes). This results in a change in the material resistance. The extent of resistance change is proportional to the amount of pressure exerted, providing a measurable electrical output that corresponds to specific pressure values.
In the BMP280 sensor, these resistance changes are converted into an electrical signal. This signal is then amplified and converted from an analog form to a digital output through an Analog-to-Digital Converter (ADC). This digital data is what is ultimately read by the microcontroller or processing unit, which interprets these readings to calculate precise pressure. Temperature compensation is integrated with altitude formulas to determine altitude changes. This sophisticated chain of physical and electronic transformations allows devices equipped with the BMP280 to monitor and react to changes in environmental conditions with high precision.
Case Study
This case study is an analysis of the BMP280 sensor to determine relative and absolute elevation resolution from the BMP280 sensor. Pressure depends on elevation with a known profile for the earth's atmosphere
$$P = P_0\left(1-\frac{g\,h}{c_p \, T_0} \right)^\frac{c_p\,M}{R_0} = P_0\left(1-\frac{L\,h}{T_0} \right)^\frac{g\,M}{R_0\,L}$$
with height (h), sea level standard atmospheric pressure (P0), heat capacity (cP), temperature lapse rate (L=g/cP), sea level standard temperature (T0), gravitational acceleration (g), molar mass of dry air (M), and the universal gas constant (Rg).
Micropython code collects pressure data from the BMP280 sensor. The GPS information is simultaneously recorded to determine the absolute height, but that is a separate utility.
import bmp280
bus = SoftI2C(scl=19, sda=18)
bmp = bmp280.BMP280(bus)
bmp.force_measure()
print(bmp.temperature)
print(bmp.pressure)
The bmp280.py script is required to access the BMP280 sensor and return the pressure and temperature. Thanks to David Stenwall Wahlund for providing the library.
from micropython import const
from ustruct import unpack as unp
# Power Modes
BMP280_POWER_SLEEP = const(0)
BMP280_POWER_FORCED = const(1)
BMP280_POWER_NORMAL = const(3)
BMP280_SPI3W_ON = const(1)
BMP280_SPI3W_OFF = const(0)
BMP280_TEMP_OS_SKIP = const(0)
BMP280_TEMP_OS_1 = const(1)
BMP280_TEMP_OS_2 = const(2)
BMP280_TEMP_OS_4 = const(3)
BMP280_TEMP_OS_8 = const(4)
BMP280_TEMP_OS_16 = const(5)
BMP280_PRES_OS_SKIP = const(0)
BMP280_PRES_OS_1 = const(1)
BMP280_PRES_OS_2 = const(2)
BMP280_PRES_OS_4 = const(3)
BMP280_PRES_OS_8 = const(4)
BMP280_PRES_OS_16 = const(5)
# Standby settings in ms
BMP280_STANDBY_0_5 = const(0)
BMP280_STANDBY_62_5 = const(1)
BMP280_STANDBY_125 = const(2)
BMP280_STANDBY_250 = const(3)
BMP280_STANDBY_500 = const(4)
BMP280_STANDBY_1000 = const(5)
BMP280_STANDBY_2000 = const(6)
BMP280_STANDBY_4000 = const(7)
# IIR Filter setting
BMP280_IIR_FILTER_OFF = const(0)
BMP280_IIR_FILTER_2 = const(1)
BMP280_IIR_FILTER_4 = const(2)
BMP280_IIR_FILTER_8 = const(3)
BMP280_IIR_FILTER_16 = const(4)
# Oversampling setting
BMP280_OS_ULTRALOW = const(0)
BMP280_OS_LOW = const(1)
BMP280_OS_STANDARD = const(2)
BMP280_OS_HIGH = const(3)
BMP280_OS_ULTRAHIGH = const(4)
# Oversampling matrix
# (PRESS_OS, TEMP_OS, sample time in ms)
_BMP280_OS_MATRIX = [
[BMP280_PRES_OS_1, BMP280_TEMP_OS_1, 7],
[BMP280_PRES_OS_2, BMP280_TEMP_OS_1, 9],
[BMP280_PRES_OS_4, BMP280_TEMP_OS_1, 14],
[BMP280_PRES_OS_8, BMP280_TEMP_OS_1, 23],
[BMP280_PRES_OS_16, BMP280_TEMP_OS_2, 44]
]
# Use cases
BMP280_CASE_HANDHELD_LOW = const(0)
BMP280_CASE_HANDHELD_DYN = const(1)
BMP280_CASE_WEATHER = const(2)
BMP280_CASE_FLOOR = const(3)
BMP280_CASE_DROP = const(4)
BMP280_CASE_INDOOR = const(5)
_BMP280_CASE_MATRIX = [
[BMP280_POWER_NORMAL, BMP280_OS_ULTRAHIGH, BMP280_IIR_FILTER_4, BMP280_STANDBY_62_5],
[BMP280_POWER_NORMAL, BMP280_OS_STANDARD, BMP280_IIR_FILTER_16, BMP280_STANDBY_0_5],
[BMP280_POWER_FORCED, BMP280_OS_ULTRALOW, BMP280_IIR_FILTER_OFF, BMP280_STANDBY_0_5],
[BMP280_POWER_NORMAL, BMP280_OS_STANDARD, BMP280_IIR_FILTER_4, BMP280_STANDBY_125],
[BMP280_POWER_NORMAL, BMP280_OS_LOW, BMP280_IIR_FILTER_OFF, BMP280_STANDBY_0_5],
[BMP280_POWER_NORMAL, BMP280_OS_ULTRAHIGH, BMP280_IIR_FILTER_16, BMP280_STANDBY_0_5]
]
_BMP280_REGISTER_ID = const(0xD0)
_BMP280_REGISTER_RESET = const(0xE0)
_BMP280_REGISTER_STATUS = const(0xF3)
_BMP280_REGISTER_CONTROL = const(0xF4)
_BMP280_REGISTER_CONFIG = const(0xF5) # IIR filter config
_BMP280_REGISTER_DATA = const(0xF7)
class BMP280:
def __init__(self, i2c_bus, addr=0x76, use_case=BMP280_CASE_HANDHELD_DYN):
self._bmp_i2c = i2c_bus
self._i2c_addr = addr
# read calibration data
# < little-endian
# H unsigned short
# h signed short
self._T1 = unp('<H', self._read(0x88, 2))[0]
self._T2 = unp('<h', self._read(0x8A, 2))[0]
self._T3 = unp('<h', self._read(0x8C, 2))[0]
self._P1 = unp('<H', self._read(0x8E, 2))[0]
self._P2 = unp('<h', self._read(0x90, 2))[0]
self._P3 = unp('<h', self._read(0x92, 2))[0]
self._P4 = unp('<h', self._read(0x94, 2))[0]
self._P5 = unp('<h', self._read(0x96, 2))[0]
self._P6 = unp('<h', self._read(0x98, 2))[0]
self._P7 = unp('<h', self._read(0x9A, 2))[0]
self._P8 = unp('<h', self._read(0x9C, 2))[0]
self._P9 = unp('<h', self._read(0x9E, 2))[0]
# output raw
self._t_raw = 0
self._t_fine = 0
self._t = 0
self._p_raw = 0
self._p = 0
self.read_wait_ms = 0 # interval between forced measure and readout
self._new_read_ms = 200 # interval between
self._last_read_ts = 0
if use_case is not None:
self.use_case(use_case)
def _read(self, addr, size=1):
return self._bmp_i2c.readfrom_mem(self._i2c_addr, addr, size)
def _write(self, addr, b_arr):
if not type(b_arr) is bytearray:
b_arr = bytearray([b_arr])
return self._bmp_i2c.writeto_mem(self._i2c_addr, addr, b_arr)
def _gauge(self):
# TODO limit new reads
# read all data at once (as by spec)
d = self._read(_BMP280_REGISTER_DATA, 6)
self._p_raw = (d[0] << 12) + (d[1] << 4) + (d[2] >> 4)
self._t_raw = (d[3] << 12) + (d[4] << 4) + (d[5] >> 4)
self._t_fine = 0
self._t = 0
self._p = 0
def reset(self):
self._write(_BMP280_REGISTER_RESET, 0xB6)
def load_test_calibration(self):
self._T1 = 27504
self._T2 = 26435
self._T3 = -1000
self._P1 = 36477
self._P2 = -10685
self._P3 = 3024
self._P4 = 2855
self._P5 = 140
self._P6 = -7
self._P7 = 15500
self._P8 = -14600
self._P9 = 6000
def load_test_data(self):
self._t_raw = 519888
self._p_raw = 415148
def print_calibration(self):
print("T1: {} {}".format(self._T1, type(self._T1)))
print("T2: {} {}".format(self._T2, type(self._T2)))
print("T3: {} {}".format(self._T3, type(self._T3)))
print("P1: {} {}".format(self._P1, type(self._P1)))
print("P2: {} {}".format(self._P2, type(self._P2)))
print("P3: {} {}".format(self._P3, type(self._P3)))
print("P4: {} {}".format(self._P4, type(self._P4)))
print("P5: {} {}".format(self._P5, type(self._P5)))
print("P6: {} {}".format(self._P6, type(self._P6)))
print("P7: {} {}".format(self._P7, type(self._P7)))
print("P8: {} {}".format(self._P8, type(self._P8)))
print("P9: {} {}".format(self._P9, type(self._P9)))
def _calc_t_fine(self):
# From datasheet page 22
self._gauge()
if self._t_fine == 0:
var1 = (((self._t_raw >> 3) - (self._T1 << 1)) * self._T2) >> 11
var2 = (((((self._t_raw >> 4) - self._T1)
* ((self._t_raw >> 4)
- self._T1)) >> 12)
* self._T3) >> 14
self._t_fine = var1 + var2
@property
def temperature(self):
self._calc_t_fine()
if self._t == 0:
self._t = ((self._t_fine * 5 + 128) >> 8) / 100.
return self._t
@property
def pressure(self):
# From datasheet page 22
self._calc_t_fine()
if self._p == 0:
var1 = self._t_fine - 128000
var2 = var1 * var1 * self._P6
var2 = var2 + ((var1 * self._P5) << 17)
var2 = var2 + (self._P4 << 35)
var1 = ((var1 * var1 * self._P3) >> 8) + ((var1 * self._P2) << 12)
var1 = (((1 << 47) + var1) * self._P1) >> 33
if var1 == 0:
return 0
p = 1048576 - self._p_raw
p = int((((p << 31) - var2) * 3125) / var1)
var1 = (self._P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self._P8 * p) >> 19
p = ((p + var1 + var2) >> 8) + (self._P7 << 4)
self._p = p / 256.0
return self._p
def _write_bits(self, address, value, length, shift=0):
d = self._read(address)[0]
m = int('1' * length, 2) << shift
d &= ~m
d |= m & value << shift
self._write(address, d)
def _read_bits(self, address, length, shift=0):
d = self._read(address)[0]
return d >> shift & int('1' * length, 2)
@property
def standby(self):
return self._read_bits(_BMP280_REGISTER_CONFIG, 3, 5)
@standby.setter
def standby(self, v):
assert 0 <= v <= 7
self._write_bits(_BMP280_REGISTER_CONFIG, v, 3, 5)
@property
def iir(self):
return self._read_bits(_BMP280_REGISTER_CONFIG, 3, 2)
@iir.setter
def iir(self, v):
assert 0 <= v <= 4
self._write_bits(_BMP280_REGISTER_CONFIG, v, 3, 2)
@property
def spi3w(self):
return self._read_bits(_BMP280_REGISTER_CONFIG, 1)
@spi3w.setter
def spi3w(self, v):
assert v in (0, 1)
self._write_bits(_BMP280_REGISTER_CONFIG, v, 1)
@property
def temp_os(self):
return self._read_bits(_BMP280_REGISTER_CONTROL, 3, 5)
@temp_os.setter
def temp_os(self, v):
assert 0 <= v <= 5
self._write_bits(_BMP280_REGISTER_CONTROL, v, 3, 5)
@property
def press_os(self):
return self._read_bits(_BMP280_REGISTER_CONTROL, 3, 2)
@press_os.setter
def press_os(self, v):
assert 0 <= v <= 5
self._write_bits(_BMP280_REGISTER_CONTROL, v, 3, 2)
@property
def power_mode(self):
return self._read_bits(_BMP280_REGISTER_CONTROL, 2)
@power_mode.setter
def power_mode(self, v):
assert 0 <= v <= 3
self._write_bits(_BMP280_REGISTER_CONTROL, v, 2)
@property
def is_measuring(self):
return bool(self._read_bits(_BMP280_REGISTER_STATUS, 1, 3))
@property
def is_updating(self):
return bool(self._read_bits(_BMP280_REGISTER_STATUS, 1))
@property
def chip_id(self):
return self._read(_BMP280_REGISTER_ID, 2)
@property
def in_normal_mode(self):
return self.power_mode == BMP280_POWER_NORMAL
def force_measure(self):
self.power_mode = BMP280_POWER_FORCED
def normal_measure(self):
self.power_mode = BMP280_POWER_NORMAL
def sleep(self):
self.power_mode = BMP280_POWER_SLEEP
def use_case(self, uc):
assert 0 <= uc <= 5
pm, oss, iir, sb = _BMP280_CASE_MATRIX[uc]
t_os, p_os, self.read_wait_ms = _BMP280_OS_MATRIX[oss]
self._write(_BMP280_REGISTER_CONFIG, (iir << 2) + (sb << 5))
self._write(_BMP280_REGISTER_CONTROL, pm + (p_os << 2) + (t_os << 5))
def oversample(self, oss):
assert 0 <= oss <= 4
t_os, p_os, self.read_wait_ms = _BMP280_OS_MATRIX[oss]
self._write_bits(_BMP280_REGISTER_CONTROL, p_os + (t_os << 3), 2)

Activity: Calculate Elevation from Pressure
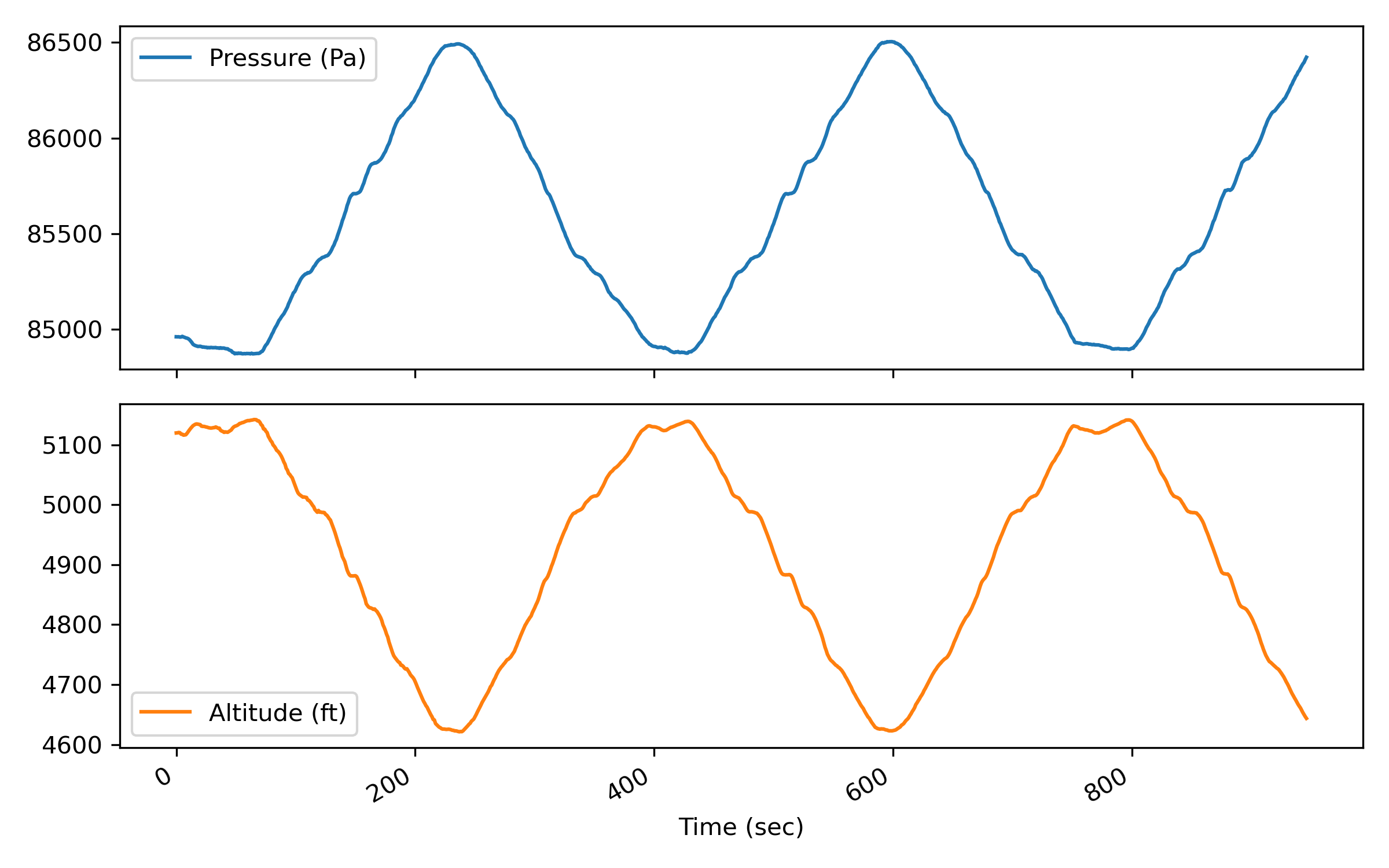
Calculate the elevation from the BMP280 pressure and compare to GPS elevation. Data from the BMP280 sensor is in the Pressure (Pa) column and it is recorded with GPS and vehicle information.

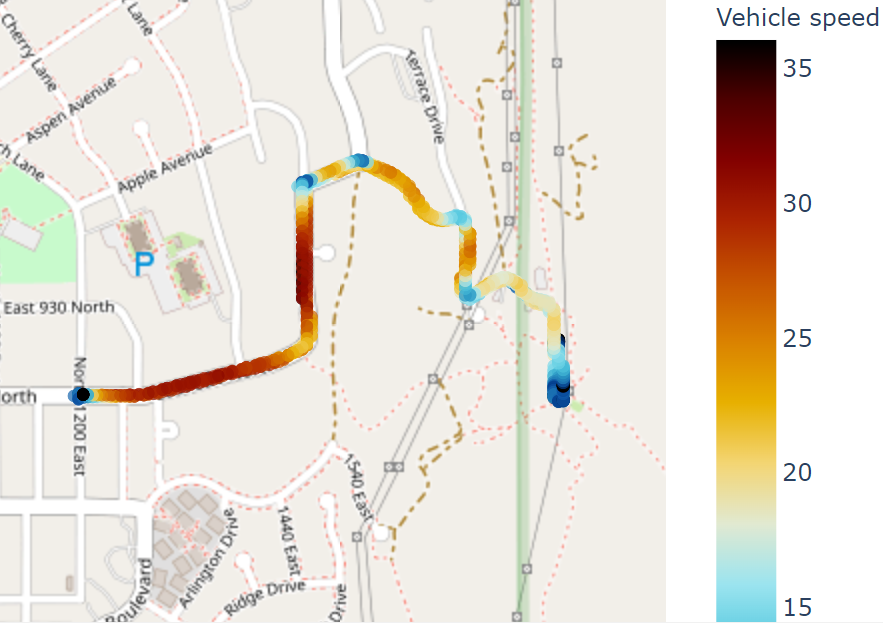
The vehicle drives from the bottom of the hill to the top 3 times. Use the first altitude (ft) to remove the offset due to barometric pressure change.
- Time (sec) - time in seconds
- Pressure (Pa) - pressure from the BMP320 sensor
- Altitude (ft) - height from GPS measurement
- Calculate the height (ft) based on pressure (Pa). There are 3.28084 ft per meter. Rearranging the pressure to elevation equation gives the height equation
$$h = \left(\frac{T_0}{L}\right)\left(1-\left(\frac{P}{P_0}\right)^{\frac{R_g L}{g\,M}}\right)$$
- Determine the one-time bias that corrects for the change in barometric pressure from the first data point.
$$bias = h_{GPS,0}-h_{calc,0}$$
- Add the bias to every calculated height unbiased height `(h_{u})` to calculate the correct height `(h_b)`.
$$h_{b} = h_{u}+bias$$
- Compare the biased height `(h_b)` with the measured GPS height.
- The barometric pressure varies slowly with weather patterns (+/- 1700 Pa). Show how a change of +1000 Pa affects the height calculation.
Additional data is also available but is not required for this analysis.
- Horz Accuracy (ft)
- Latitude (deg), Longitude (deg)
- Vehicle speed (MPH), GPS Speed (MPH)
- Accel X (ft/s2), Accel Y (ft/s2), Accel Z (ft/s2)
- Accel (Grav) X (ft/s2), Accel (Grav) Y (ft/s2), Accel (Grav) Z (ft/s2)
- Rotation Rate X (deg/s),Rotation Rate Y (deg/s), Rotation Rate Z (deg/s)
- Magnetometer X (µT),Magnetometer Y (µT),Magnetometer Z (µT)
- Roll (deg), Pitch (deg), Bearing (deg)