TCLab D - Empirical Model Estimation
The TCLab is a hands-on application of machine learning and advanced temperature control with two heaters and two temperature sensors. The labs reinforce principles of model development, estimation, and advanced control methods. This is the fourth exercise and it involves system identification using empirical data. The predictions are aligned to the measured values through an optimizer that adjusts the empirical parameters to minimize a sum of squared error or sum of absolute values objective. There are 1st order, 2nd order, and higher order estimation examples.
Lab Problem Statement
Data and Solutions
import numpy as np
import pandas as pd
import tclab
import time
import matplotlib.pyplot as plt
# generate step test data on Arduino
filename = 'tclab_dyn_data2.csv'
# heater steps
Q1d = np.zeros(601)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q2d = np.zeros(601)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Time,H1,H2,T1,T2\n')
fid.close()
# run step test (10 min)
for i in range(601):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + \
' H1: ' + str(Q1d[i]) + \
' H2: ' + str(Q2d[i]) + \
' T1: ' + str(a.T1) + \
' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+','+str(Q1d[i])+','+str(Q2d[i])+',' \
+str(a.T1)+','+str(a.T2)+'\n')
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# plot measurements
plt.figure()
plt.subplot(2,1,1)
plt.plot(data['Time'],data['H1'],'r-',label='Heater 1')
plt.plot(data['Time'],data['H2'],'b--',label='Heater 2')
plt.ylabel('Heater (%)')
plt.legend(loc='best')
plt.subplot(2,1,2)
plt.plot(data['Time'],data['T1'],'r.',label='Temperature 1')
plt.plot(data['Time'],data['T2'],'b.',label='Temperature 2')
plt.ylabel('Temperature (degC)')
plt.legend(loc='best')
plt.xlabel('Time (sec)')
plt.savefig('tclab_dyn_meas2.png')
plt.show()
import pandas as pd
import tclab
import time
import matplotlib.pyplot as plt
# generate step test data on Arduino
filename = 'tclab_dyn_data2.csv'
# heater steps
Q1d = np.zeros(601)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q2d = np.zeros(601)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Time,H1,H2,T1,T2\n')
fid.close()
# run step test (10 min)
for i in range(601):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + \
' H1: ' + str(Q1d[i]) + \
' H2: ' + str(Q2d[i]) + \
' T1: ' + str(a.T1) + \
' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+','+str(Q1d[i])+','+str(Q2d[i])+',' \
+str(a.T1)+','+str(a.T2)+'\n')
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# plot measurements
plt.figure()
plt.subplot(2,1,1)
plt.plot(data['Time'],data['H1'],'r-',label='Heater 1')
plt.plot(data['Time'],data['H2'],'b--',label='Heater 2')
plt.ylabel('Heater (%)')
plt.legend(loc='best')
plt.subplot(2,1,2)
plt.plot(data['Time'],data['T1'],'r.',label='Temperature 1')
plt.plot(data['Time'],data['T2'],'b.',label='Temperature 2')
plt.ylabel('Temperature (degC)')
plt.legend(loc='best')
plt.xlabel('Time (sec)')
plt.savefig('tclab_dyn_meas2.png')
plt.show()
1st Order System Identification
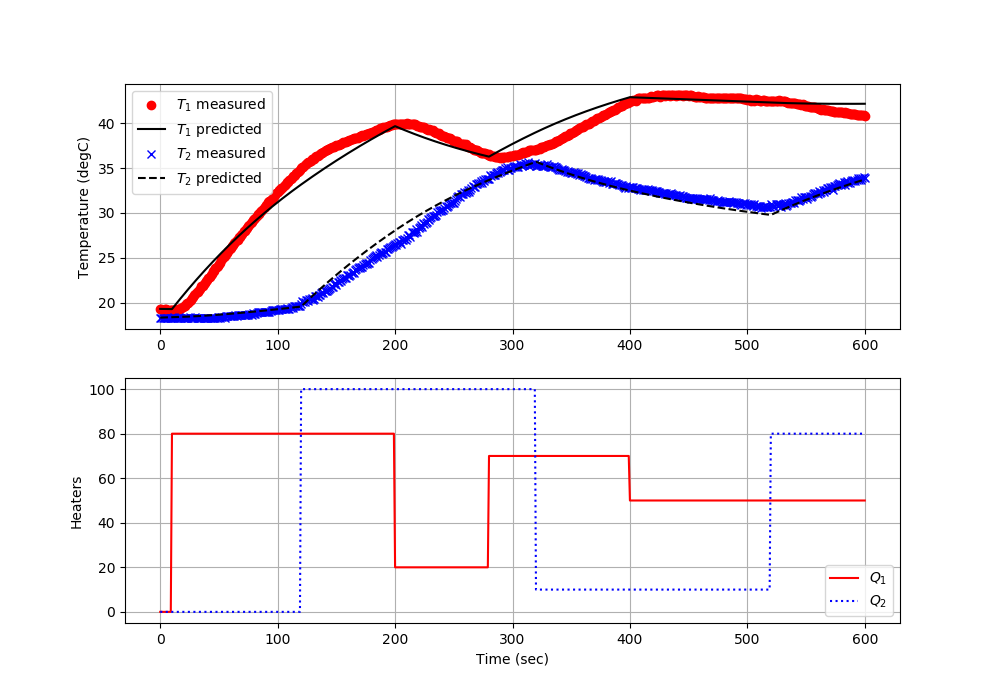
See information on First Order Systems.
import numpy as np
import time
import matplotlib.pyplot as plt
import random
# get gekko package with:
# pip install gekko
from gekko import GEKKO
import pandas as pd
# import data
try:
# read data file if available
data = pd.read_csv('tclab_dyn_data2.csv')
except:
# retrieve data file from Internet source
url = 'http://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
tm = data['Time'].values
Q1s = data['H1'].values # heater 1
Q2s = data['H2'].values # heater 2
T1s = data['T1'].values
T2s = data['T2'].values
#########################################################
# Initialize Model as Estimator
#########################################################
m = GEKKO(remote=True)
m.time = tm
# Parameters to Estimate
K1 = m.FV(value=0.5,lb=0.1,ub=1.0)
K2 = m.FV(value=0.3,lb=0.1,ub=1.0)
K3 = m.FV(value=0.1,lb=0.0001,ub=1.0)
tau12 = m.FV(value=150,lb=50,ub=250)
K1.STATUS = 1
K2.STATUS = 1
K3.STATUS = 1
tau12.STATUS = 1
# Measured inputs
Q1 = m.MV(value=Q1s)
Q2 = m.MV(value=Q2s)
# use measurements
Q1.FSTATUS = 1 # measured
Q2.FSTATUS = 1 # measured
# Ambient temperature
Ta = m.Param(value=19.0) # degC
# Measurements for model alignment
TC1 = m.CV(value=T1s)
TC1.STATUS = 1 # minimize error between simulation and measurement
TC1.FSTATUS = 1 # receive measurement
TC1.MEAS_GAP = 0.1 # measurement deadband gap
TC2 = m.CV(value=T2s)
TC2.STATUS = 1 # minimize error between simulation and measurement
TC2.FSTATUS = 1 # receive measurement
TC2.MEAS_GAP = 0.1 # measurement deadband gap
# Heat transfer between two heaters
DT = m.Intermediate(TC2-TC1)
# Empirical correlations
m.Equation(tau12 * TC1.dt() + (TC1-Ta) == K1*Q1 + K3*DT)
m.Equation(tau12 * TC2.dt() + (TC2-Ta) == K2*Q2 - K3*DT)
# Global Options
m.options.IMODE = 5 # MHE
m.options.EV_TYPE = 2 # Objective type
m.options.NODES = 3 # Collocation nodes
m.options.SOLVER = 3 # IPOPT
# Predict Parameters and Temperatures
m.solve()
# Create plot
plt.figure(figsize=(10,7))
ax=plt.subplot(2,1,1)
ax.grid()
plt.plot(tm,T1s,'ro',label=r'$T_1$ measured')
plt.plot(tm,TC1.value,'k-',label=r'$T_1$ predicted')
plt.plot(tm,T2s,'bx',label=r'$T_2$ measured')
plt.plot(tm,TC2.value,'k--',label=r'$T_2$ predicted')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(2,1,2)
ax.grid()
plt.plot(tm,Q1s,'r-',label=r'$Q_1$')
plt.plot(tm,Q2s,'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
# Print optimal values
print('K1: ' + str(K1.newval))
print('K2: ' + str(K2.newval))
print('K3: ' + str(K3.newval))
print('tau12: ' + str(tau12.newval))
# Save and show figure
plt.savefig('tclab_1st_order.png')
plt.show()
import time
import matplotlib.pyplot as plt
import random
# get gekko package with:
# pip install gekko
from gekko import GEKKO
import pandas as pd
# import data
try:
# read data file if available
data = pd.read_csv('tclab_dyn_data2.csv')
except:
# retrieve data file from Internet source
url = 'http://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
tm = data['Time'].values
Q1s = data['H1'].values # heater 1
Q2s = data['H2'].values # heater 2
T1s = data['T1'].values
T2s = data['T2'].values
#########################################################
# Initialize Model as Estimator
#########################################################
m = GEKKO(remote=True)
m.time = tm
# Parameters to Estimate
K1 = m.FV(value=0.5,lb=0.1,ub=1.0)
K2 = m.FV(value=0.3,lb=0.1,ub=1.0)
K3 = m.FV(value=0.1,lb=0.0001,ub=1.0)
tau12 = m.FV(value=150,lb=50,ub=250)
K1.STATUS = 1
K2.STATUS = 1
K3.STATUS = 1
tau12.STATUS = 1
# Measured inputs
Q1 = m.MV(value=Q1s)
Q2 = m.MV(value=Q2s)
# use measurements
Q1.FSTATUS = 1 # measured
Q2.FSTATUS = 1 # measured
# Ambient temperature
Ta = m.Param(value=19.0) # degC
# Measurements for model alignment
TC1 = m.CV(value=T1s)
TC1.STATUS = 1 # minimize error between simulation and measurement
TC1.FSTATUS = 1 # receive measurement
TC1.MEAS_GAP = 0.1 # measurement deadband gap
TC2 = m.CV(value=T2s)
TC2.STATUS = 1 # minimize error between simulation and measurement
TC2.FSTATUS = 1 # receive measurement
TC2.MEAS_GAP = 0.1 # measurement deadband gap
# Heat transfer between two heaters
DT = m.Intermediate(TC2-TC1)
# Empirical correlations
m.Equation(tau12 * TC1.dt() + (TC1-Ta) == K1*Q1 + K3*DT)
m.Equation(tau12 * TC2.dt() + (TC2-Ta) == K2*Q2 - K3*DT)
# Global Options
m.options.IMODE = 5 # MHE
m.options.EV_TYPE = 2 # Objective type
m.options.NODES = 3 # Collocation nodes
m.options.SOLVER = 3 # IPOPT
# Predict Parameters and Temperatures
m.solve()
# Create plot
plt.figure(figsize=(10,7))
ax=plt.subplot(2,1,1)
ax.grid()
plt.plot(tm,T1s,'ro',label=r'$T_1$ measured')
plt.plot(tm,TC1.value,'k-',label=r'$T_1$ predicted')
plt.plot(tm,T2s,'bx',label=r'$T_2$ measured')
plt.plot(tm,TC2.value,'k--',label=r'$T_2$ predicted')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(2,1,2)
ax.grid()
plt.plot(tm,Q1s,'r-',label=r'$Q_1$')
plt.plot(tm,Q2s,'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
# Print optimal values
print('K1: ' + str(K1.newval))
print('K2: ' + str(K2.newval))
print('K3: ' + str(K3.newval))
print('tau12: ' + str(tau12.newval))
# Save and show figure
plt.savefig('tclab_1st_order.png')
plt.show()
2nd Order System Identification
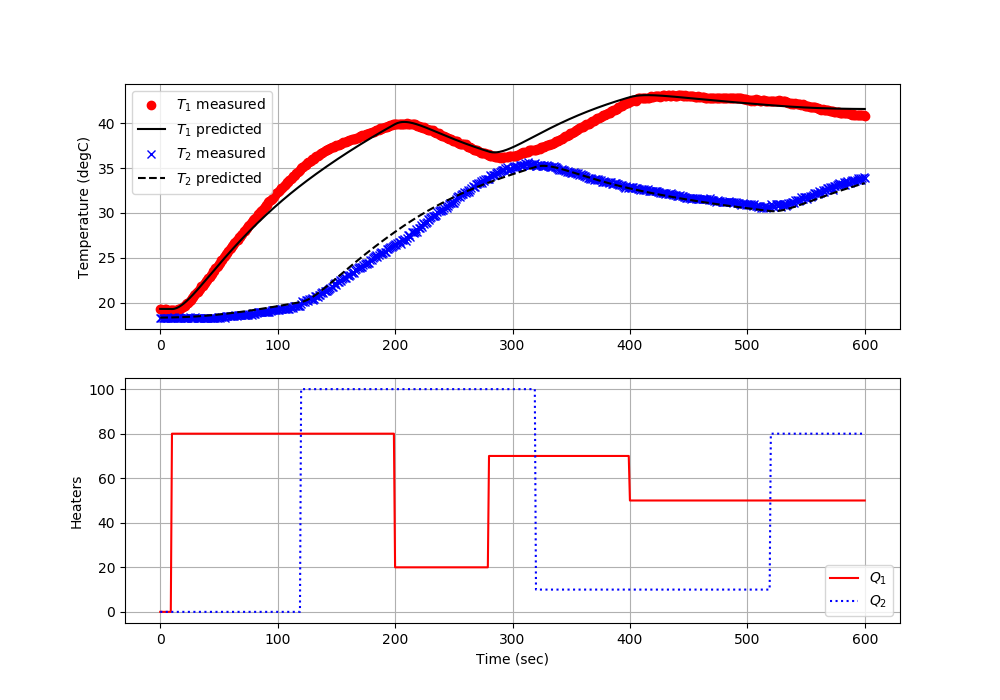
See information on Second Order Systems.
import numpy as np
import time
import matplotlib.pyplot as plt
import random
# get gekko package with:
# pip install gekko
from gekko import GEKKO
import pandas as pd
# import data
try:
# read data file if available
data = pd.read_csv('tclab_dyn_data2.csv')
except:
# retrieve data file from Internet source
url = 'http://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
tm = data['Time'].values
Q1s = data['H1'].values # heater 1
Q2s = data['H2'].values # heater 2
T1s = data['T1'].values
T2s = data['T2'].values
#########################################################
# Initialize Model as Estimator
#########################################################
m = GEKKO(remote=True)
m.time = tm
# Parameters to Estimate
K1 = m.FV(value=0.5,lb=0.1,ub=1.0)
K2 = m.FV(value=0.3,lb=0.1,ub=1.0)
K3 = m.FV(value=0.1,lb=0.0001,ub=1.0)
tau12 = m.FV(value=150,lb=50,ub=250)
tau3 = m.FV(value=15,lb=10,ub=20)
K1.STATUS = 1
K2.STATUS = 1
K3.STATUS = 1
tau12.STATUS = 1
tau3.STATUS = 1
# Measured inputs
Q1 = m.MV(value=Q1s)
Q2 = m.MV(value=Q2s)
# use measurements
Q1.FSTATUS = 1 # measured
Q2.FSTATUS = 1 # measured
# Ambient temperature
Ta = m.Param(value=19.0) # degC
# State variables
TH1 = m.SV(value=T1s[0])
TH2 = m.SV(value=T2s[0])
# Measurements for model alignment
TC1 = m.CV(value=T1s)
TC1.STATUS = 1 # minimize error between simulation and measurement
TC1.FSTATUS = 1 # receive measurement
TC1.MEAS_GAP = 0.1 # measurement deadband gap
TC2 = m.CV(value=T2s)
TC2.STATUS = 1 # minimize error between simulation and measurement
TC2.FSTATUS = 1 # receive measurement
TC2.MEAS_GAP = 0.1 # measurement deadband gap
# Heat transfer between two heaters
DT = m.Intermediate(TH2-TH1)
# Empirical correlations
m.Equation(tau12 * TH1.dt() + (TH1-Ta) == K1*Q1 + K3*DT)
m.Equation(tau12 * TH2.dt() + (TH2-Ta) == K2*Q2 - K3*DT)
m.Equation(tau3 * TC1.dt() + TC1 == TH1)
m.Equation(tau3 * TC2.dt() + TC2 == TH2)
# Global Options
m.options.IMODE = 5 # MHE
m.options.EV_TYPE = 2 # Objective type
m.options.NODES = 3 # Collocation nodes
m.options.SOLVER = 3 # IPOPT
# Predict Parameters and Temperatures
m.solve()
# Create plot
plt.figure(figsize=(10,7))
ax=plt.subplot(2,1,1)
ax.grid()
plt.plot(tm,T1s,'ro',label=r'$T_1$ measured')
plt.plot(tm,TC1.value,'k-',label=r'$T_1$ predicted')
plt.plot(tm,T2s,'bx',label=r'$T_2$ measured')
plt.plot(tm,TC2.value,'k--',label=r'$T_2$ predicted')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(2,1,2)
ax.grid()
plt.plot(tm,Q1s,'r-',label=r'$Q_1$')
plt.plot(tm,Q2s,'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
# Print optimal values
print('K1: ' + str(K1.newval))
print('K2: ' + str(K2.newval))
print('K3: ' + str(K3.newval))
print('tau12: ' + str(tau12.newval))
print('tau3: ' + str(tau3.newval))
# Save and show figure
plt.savefig('tclab_2nd_order.png')
plt.show()
import time
import matplotlib.pyplot as plt
import random
# get gekko package with:
# pip install gekko
from gekko import GEKKO
import pandas as pd
# import data
try:
# read data file if available
data = pd.read_csv('tclab_dyn_data2.csv')
except:
# retrieve data file from Internet source
url = 'http://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
tm = data['Time'].values
Q1s = data['H1'].values # heater 1
Q2s = data['H2'].values # heater 2
T1s = data['T1'].values
T2s = data['T2'].values
#########################################################
# Initialize Model as Estimator
#########################################################
m = GEKKO(remote=True)
m.time = tm
# Parameters to Estimate
K1 = m.FV(value=0.5,lb=0.1,ub=1.0)
K2 = m.FV(value=0.3,lb=0.1,ub=1.0)
K3 = m.FV(value=0.1,lb=0.0001,ub=1.0)
tau12 = m.FV(value=150,lb=50,ub=250)
tau3 = m.FV(value=15,lb=10,ub=20)
K1.STATUS = 1
K2.STATUS = 1
K3.STATUS = 1
tau12.STATUS = 1
tau3.STATUS = 1
# Measured inputs
Q1 = m.MV(value=Q1s)
Q2 = m.MV(value=Q2s)
# use measurements
Q1.FSTATUS = 1 # measured
Q2.FSTATUS = 1 # measured
# Ambient temperature
Ta = m.Param(value=19.0) # degC
# State variables
TH1 = m.SV(value=T1s[0])
TH2 = m.SV(value=T2s[0])
# Measurements for model alignment
TC1 = m.CV(value=T1s)
TC1.STATUS = 1 # minimize error between simulation and measurement
TC1.FSTATUS = 1 # receive measurement
TC1.MEAS_GAP = 0.1 # measurement deadband gap
TC2 = m.CV(value=T2s)
TC2.STATUS = 1 # minimize error between simulation and measurement
TC2.FSTATUS = 1 # receive measurement
TC2.MEAS_GAP = 0.1 # measurement deadband gap
# Heat transfer between two heaters
DT = m.Intermediate(TH2-TH1)
# Empirical correlations
m.Equation(tau12 * TH1.dt() + (TH1-Ta) == K1*Q1 + K3*DT)
m.Equation(tau12 * TH2.dt() + (TH2-Ta) == K2*Q2 - K3*DT)
m.Equation(tau3 * TC1.dt() + TC1 == TH1)
m.Equation(tau3 * TC2.dt() + TC2 == TH2)
# Global Options
m.options.IMODE = 5 # MHE
m.options.EV_TYPE = 2 # Objective type
m.options.NODES = 3 # Collocation nodes
m.options.SOLVER = 3 # IPOPT
# Predict Parameters and Temperatures
m.solve()
# Create plot
plt.figure(figsize=(10,7))
ax=plt.subplot(2,1,1)
ax.grid()
plt.plot(tm,T1s,'ro',label=r'$T_1$ measured')
plt.plot(tm,TC1.value,'k-',label=r'$T_1$ predicted')
plt.plot(tm,T2s,'bx',label=r'$T_2$ measured')
plt.plot(tm,TC2.value,'k--',label=r'$T_2$ predicted')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(2,1,2)
ax.grid()
plt.plot(tm,Q1s,'r-',label=r'$Q_1$')
plt.plot(tm,Q2s,'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
# Print optimal values
print('K1: ' + str(K1.newval))
print('K2: ' + str(K2.newval))
print('K3: ' + str(K3.newval))
print('tau12: ' + str(tau12.newval))
print('tau3: ' + str(tau3.newval))
# Save and show figure
plt.savefig('tclab_2nd_order.png')
plt.show()
from gekko import GEKKO
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# load data and parse into columns
url = 'http://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
t = data['Time']
u = data[['H1','H2']]
y = data[['T1','T2']]
m = GEKKO()
# system identification
na = 2 # output coefficients
nb = 2 # input coefficients
yp,p,K = m.sysid(t,u,y,na,nb,pred='meas')
plt.figure()
plt.subplot(2,1,1)
plt.plot(t,u,label=r'$Heater_1$')
plt.legend([r'$Heater_1$',r'$Heater_2$'])
plt.ylabel('Heaters')
plt.subplot(2,1,2)
plt.plot(t,y)
plt.plot(t,yp,'--')
plt.legend([r'$T1_{meas}$',r'$T2_{meas}$',\
r'$T1_{pred}$',r'$T2_{pred}$'])
plt.ylabel('Temperature (°C)')
plt.xlabel('Time (sec)')
plt.show()
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
# load data and parse into columns
url = 'http://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
t = data['Time']
u = data[['H1','H2']]
y = data[['T1','T2']]
m = GEKKO()
# system identification
na = 2 # output coefficients
nb = 2 # input coefficients
yp,p,K = m.sysid(t,u,y,na,nb,pred='meas')
plt.figure()
plt.subplot(2,1,1)
plt.plot(t,u,label=r'$Heater_1$')
plt.legend([r'$Heater_1$',r'$Heater_2$'])
plt.ylabel('Heaters')
plt.subplot(2,1,2)
plt.plot(t,y)
plt.plot(t,yp,'--')
plt.legend([r'$T1_{meas}$',r'$T2_{meas}$',\
r'$T1_{pred}$',r'$T2_{pred}$'])
plt.ylabel('Temperature (°C)')
plt.xlabel('Time (sec)')
plt.show()
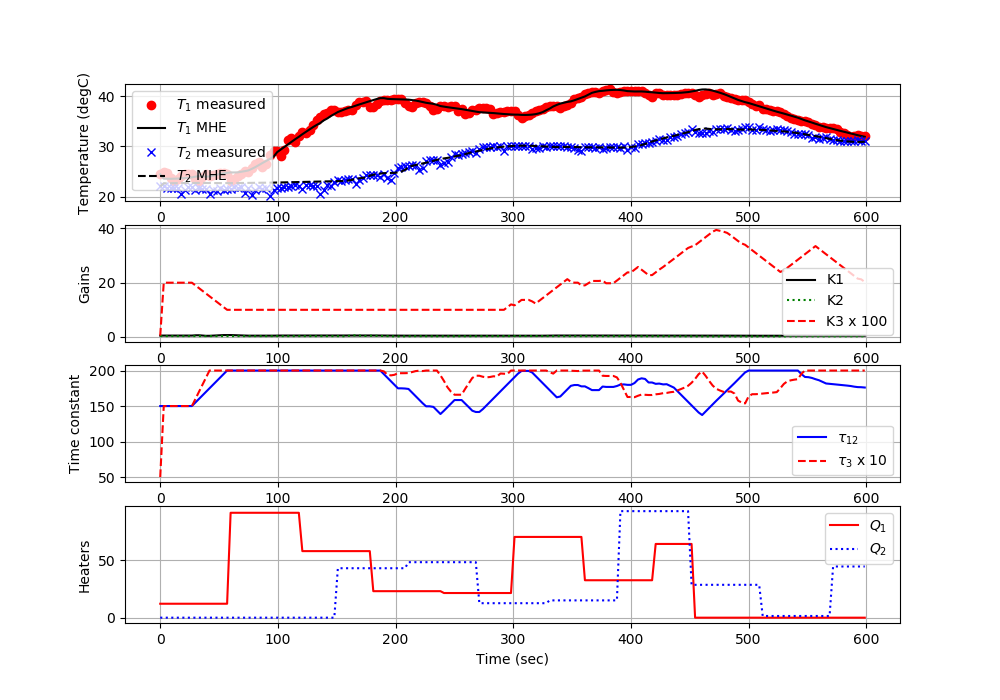
2nd Order System Identification with MHE
See information on Second Order Systems and Moving Horizon Estimation.
import numpy as np
import time
import matplotlib.pyplot as plt
import random
# get gekko package with:
# pip install gekko
from gekko import GEKKO
# get tclab package with:
# pip install tclab
from tclab import TCLab
# save txt file
def save_txt(t,Q1,Q2,T1,T2):
data = np.vstack((t,Q1,Q2,T1,T2)) # vertical stack
data = data.T # transpose data
top = 'Time (sec), Heater 1, Heater 2, ' \
+ 'Temperature 1, Temperature 2'
np.savetxt('data.txt',data,delimiter=',',header=top,comments='')
# Connect to Arduino
a = TCLab()
# Final time
tf = 10 # min
# number of data points (every 3 seconds)
n = tf * 20 + 1
# Configure heater levels
# Percent Heater (0-100%)
Q1s = np.zeros(n)
Q2s = np.zeros(n)
# Heater random steps every 50 sec
# Alternate steps by Q1 and Q2
# with rapid, random changes every 10 cycles
for i in range(n):
if i%20==0:
Q1s[i:i+20] = random.random() * 100.0
if (i+10)%20==0:
Q2s[i:i+20] = random.random() * 100.0
# heater 2 initially off
Q2s[0:50] = 0.0
# heater 1 off at end (last 50 cycles)
Q1s[-50:-1] = 0.0
# Record initial temperatures (degC)
T1m = a.T1 * np.ones(n)
T2m = a.T2 * np.ones(n)
# Store MHE values for plots
Tmhe1 = T1m[0] * np.ones(n)
Tmhe2 = T2m[0] * np.ones(n)
K1s = 0.5 * np.ones(n)
K2s = 0.3 * np.ones(n)
K3s = 0.005 * np.ones(n)
tau12s = 150.0 * np.ones(n)
tau3s = 5.0 * np.ones(n)
#########################################################
# Initialize Model as Estimator
#########################################################
m = GEKKO(name='tclab-mhe',remote=False)
# 120 second time horizon, 40 steps
m.time = np.linspace(0,120,41)
# Parameters to Estimate
K1 = m.FV(value=0.5)
K1.STATUS = 0
K1.FSTATUS = 0
K1.DMAX = 0.1
K1.LOWER = 0.1
K1.UPPER = 1.0
K2 = m.FV(value=0.3)
K2.STATUS = 0
K2.FSTATUS = 0
K2.DMAX = 0.1
K2.LOWER = 0.1
K2.UPPER = 1.0
K3 = m.FV(value=0.2)
K3.STATUS = 0
K3.FSTATUS = 0
K3.DMAX = 0.01
K3.LOWER = 0.1
K3.UPPER = 1.0
tau12 = m.FV(value=150)
tau12.STATUS = 0
tau12.FSTATUS = 0
tau12.DMAX = 5.0
tau12.LOWER = 50.0
tau12.UPPER = 200
tau3 = m.FV(value=15)
tau3.STATUS = 0
tau3.FSTATUS = 0
tau3.DMAX = 1
tau3.LOWER = 10
tau3.UPPER = 20
# Measured inputs
Q1 = m.MV(value=0)
Q1.FSTATUS = 1 # measured
Q2 = m.MV(value=0)
Q2.FSTATUS = 1 # measured
# State variables
TH1 = m.SV(value=T1m[0])
TH2 = m.SV(value=T2m[0])
# Measurements for model alignment
TC1 = m.CV(value=T1m[0])
TC1.STATUS = 1 # minimize error
TC1.FSTATUS = 1 # receive measurement
TC1.MEAS_GAP = 0.1 # measurement deadband gap
TC2 = m.CV(value=T2m[0])
TC2.STATUS = 1 # minimize error
TC2.FSTATUS = 1 # receive measurement
TC2.MEAS_GAP = 0.1 # measurement deadband gap
Ta = m.Param(value=23.0) # degC
# Heat transfer between two heaters
DT = m.Intermediate(TH2-TH1)
# Empirical correlations
m.Equation(tau12 * TH1.dt() + (TH1-Ta) == K1*Q1 + K3*DT)
m.Equation(tau12 * TH2.dt() + (TH2-Ta) == K2*Q2 - K3*DT)
m.Equation(tau3 * TC1.dt() + TC1 == TH1)
m.Equation(tau3 * TC2.dt() + TC2 == TH2)
# Global Options
m.options.IMODE = 5 # MHE
m.options.EV_TYPE = 1 # Objective type
m.options.NODES = 3 # Collocation nodes
m.options.SOLVER = 3 # IPOPT
m.options.COLDSTART = 1 # COLDSTART on first cycle
##################################################################
# Create plot
plt.figure(figsize=(10,7))
plt.ion()
plt.show()
# Main Loop
start_time = time.time()
prev_time = start_time
tm = np.zeros(n)
try:
for i in range(1,n):
# Sleep time
sleep_max = 3.0
sleep = sleep_max - (time.time() - prev_time)
if sleep>=0.01:
time.sleep(sleep-0.01)
else:
time.sleep(0.01)
# Record time and change in time
t = time.time()
dt = t - prev_time
prev_time = t
tm[i] = t - start_time
# Read temperatures in Celsius
T1m[i] = a.T1
T2m[i] = a.T2
# Insert measurements
TC1.MEAS = T1m[i]
TC2.MEAS = T2m[i]
Q1.MEAS = Q1s[i-1]
Q2.MEAS = Q2s[i-1]
# Start estimating U after 10 cycles (20 sec)
if i==10:
K1.STATUS = 1
K2.STATUS = 1
K3.STATUS = 1
tau12.STATUS = 1
tau3.STATUS = 1
# Predict Parameters and Temperatures with MHE
# use remote=False for local solve
m.solve()
if m.options.APPSTATUS == 1:
# Retrieve new values
Tmhe1[i] = TC1.MODEL
Tmhe2[i] = TC2.MODEL
K1s[i] = K1.NEWVAL
K2s[i] = K2.NEWVAL
K3s[i] = K3.NEWVAL
tau12s[i] = tau12.NEWVAL
tau3s[i] = tau3.NEWVAL
else:
# Solution failed, copy prior solution
Tmhe1[i] = Tmhe1[i-1]
Tmhe2[i] = Tmhe1[i-1]
K1s[i] = K1s[i-1]
K2s[i] = K2s[i-1]
K3s[i] = K3s[i-1]
tau12s[i] = tau12s[i-1]
tau3s[i] = tau3s[i-1]
# Write new heater values (0-100)
a.Q1(Q1s[i])
a.Q2(Q2s[i])
# Plot
plt.clf()
ax=plt.subplot(4,1,1)
ax.grid()
plt.plot(tm[0:i],T1m[0:i],'ro',label=r'$T_1$ measured')
plt.plot(tm[0:i],Tmhe1[0:i],'k-',label=r'$T_1$ MHE')
plt.plot(tm[0:i],T2m[0:i],'bx',label=r'$T_2$ measured')
plt.plot(tm[0:i],Tmhe2[0:i],'k--',label=r'$T_2$ MHE')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(4,1,2)
ax.grid()
plt.plot(tm[0:i],K1s[0:i],'k-',label='K1')
plt.plot(tm[0:i],K2s[0:i],'g:',label='K2')
plt.plot(tm[0:i],K3s[0:i]*100,'r--',label='K3 x 100')
plt.ylabel('Gains')
plt.legend(loc='best')
ax=plt.subplot(4,1,3)
ax.grid()
plt.plot(tm[0:i],tau12s[0:i],'b-',label=r'$\tau_{12}$')
plt.plot(tm[0:i],tau3s[0:i]*10,'r--',label=r'$\tau_3$ x 10')
plt.ylabel('Time constant')
plt.legend(loc='best')
ax=plt.subplot(4,1,4)
ax.grid()
plt.plot(tm[0:i],Q1s[0:i],'r-',label=r'$Q_1$')
plt.plot(tm[0:i],Q2s[0:i],'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
plt.draw()
plt.pause(0.05)
# Turn off heaters
a.Q1(0)
a.Q2(0)
save_txt(tm,Q1s,Q2s,T1m,T2m)
# Save figure
plt.savefig('tclab_mhe.png')
# Allow user to end loop with Ctrl-C
except KeyboardInterrupt:
# Disconnect from Arduino
a.Q1(0)
a.Q2(0)
print('Shutting down')
a.close()
plt.savefig('tclab_mhe.png')
# Make sure serial connection still closes when there's an error
except:
# Disconnect from Arduino
a.Q1(0)
a.Q2(0)
print('Error: Shutting down')
a.close()
plt.savefig('tclab_mhe.png')
raise
import time
import matplotlib.pyplot as plt
import random
# get gekko package with:
# pip install gekko
from gekko import GEKKO
# get tclab package with:
# pip install tclab
from tclab import TCLab
# save txt file
def save_txt(t,Q1,Q2,T1,T2):
data = np.vstack((t,Q1,Q2,T1,T2)) # vertical stack
data = data.T # transpose data
top = 'Time (sec), Heater 1, Heater 2, ' \
+ 'Temperature 1, Temperature 2'
np.savetxt('data.txt',data,delimiter=',',header=top,comments='')
# Connect to Arduino
a = TCLab()
# Final time
tf = 10 # min
# number of data points (every 3 seconds)
n = tf * 20 + 1
# Configure heater levels
# Percent Heater (0-100%)
Q1s = np.zeros(n)
Q2s = np.zeros(n)
# Heater random steps every 50 sec
# Alternate steps by Q1 and Q2
# with rapid, random changes every 10 cycles
for i in range(n):
if i%20==0:
Q1s[i:i+20] = random.random() * 100.0
if (i+10)%20==0:
Q2s[i:i+20] = random.random() * 100.0
# heater 2 initially off
Q2s[0:50] = 0.0
# heater 1 off at end (last 50 cycles)
Q1s[-50:-1] = 0.0
# Record initial temperatures (degC)
T1m = a.T1 * np.ones(n)
T2m = a.T2 * np.ones(n)
# Store MHE values for plots
Tmhe1 = T1m[0] * np.ones(n)
Tmhe2 = T2m[0] * np.ones(n)
K1s = 0.5 * np.ones(n)
K2s = 0.3 * np.ones(n)
K3s = 0.005 * np.ones(n)
tau12s = 150.0 * np.ones(n)
tau3s = 5.0 * np.ones(n)
#########################################################
# Initialize Model as Estimator
#########################################################
m = GEKKO(name='tclab-mhe',remote=False)
# 120 second time horizon, 40 steps
m.time = np.linspace(0,120,41)
# Parameters to Estimate
K1 = m.FV(value=0.5)
K1.STATUS = 0
K1.FSTATUS = 0
K1.DMAX = 0.1
K1.LOWER = 0.1
K1.UPPER = 1.0
K2 = m.FV(value=0.3)
K2.STATUS = 0
K2.FSTATUS = 0
K2.DMAX = 0.1
K2.LOWER = 0.1
K2.UPPER = 1.0
K3 = m.FV(value=0.2)
K3.STATUS = 0
K3.FSTATUS = 0
K3.DMAX = 0.01
K3.LOWER = 0.1
K3.UPPER = 1.0
tau12 = m.FV(value=150)
tau12.STATUS = 0
tau12.FSTATUS = 0
tau12.DMAX = 5.0
tau12.LOWER = 50.0
tau12.UPPER = 200
tau3 = m.FV(value=15)
tau3.STATUS = 0
tau3.FSTATUS = 0
tau3.DMAX = 1
tau3.LOWER = 10
tau3.UPPER = 20
# Measured inputs
Q1 = m.MV(value=0)
Q1.FSTATUS = 1 # measured
Q2 = m.MV(value=0)
Q2.FSTATUS = 1 # measured
# State variables
TH1 = m.SV(value=T1m[0])
TH2 = m.SV(value=T2m[0])
# Measurements for model alignment
TC1 = m.CV(value=T1m[0])
TC1.STATUS = 1 # minimize error
TC1.FSTATUS = 1 # receive measurement
TC1.MEAS_GAP = 0.1 # measurement deadband gap
TC2 = m.CV(value=T2m[0])
TC2.STATUS = 1 # minimize error
TC2.FSTATUS = 1 # receive measurement
TC2.MEAS_GAP = 0.1 # measurement deadband gap
Ta = m.Param(value=23.0) # degC
# Heat transfer between two heaters
DT = m.Intermediate(TH2-TH1)
# Empirical correlations
m.Equation(tau12 * TH1.dt() + (TH1-Ta) == K1*Q1 + K3*DT)
m.Equation(tau12 * TH2.dt() + (TH2-Ta) == K2*Q2 - K3*DT)
m.Equation(tau3 * TC1.dt() + TC1 == TH1)
m.Equation(tau3 * TC2.dt() + TC2 == TH2)
# Global Options
m.options.IMODE = 5 # MHE
m.options.EV_TYPE = 1 # Objective type
m.options.NODES = 3 # Collocation nodes
m.options.SOLVER = 3 # IPOPT
m.options.COLDSTART = 1 # COLDSTART on first cycle
##################################################################
# Create plot
plt.figure(figsize=(10,7))
plt.ion()
plt.show()
# Main Loop
start_time = time.time()
prev_time = start_time
tm = np.zeros(n)
try:
for i in range(1,n):
# Sleep time
sleep_max = 3.0
sleep = sleep_max - (time.time() - prev_time)
if sleep>=0.01:
time.sleep(sleep-0.01)
else:
time.sleep(0.01)
# Record time and change in time
t = time.time()
dt = t - prev_time
prev_time = t
tm[i] = t - start_time
# Read temperatures in Celsius
T1m[i] = a.T1
T2m[i] = a.T2
# Insert measurements
TC1.MEAS = T1m[i]
TC2.MEAS = T2m[i]
Q1.MEAS = Q1s[i-1]
Q2.MEAS = Q2s[i-1]
# Start estimating U after 10 cycles (20 sec)
if i==10:
K1.STATUS = 1
K2.STATUS = 1
K3.STATUS = 1
tau12.STATUS = 1
tau3.STATUS = 1
# Predict Parameters and Temperatures with MHE
# use remote=False for local solve
m.solve()
if m.options.APPSTATUS == 1:
# Retrieve new values
Tmhe1[i] = TC1.MODEL
Tmhe2[i] = TC2.MODEL
K1s[i] = K1.NEWVAL
K2s[i] = K2.NEWVAL
K3s[i] = K3.NEWVAL
tau12s[i] = tau12.NEWVAL
tau3s[i] = tau3.NEWVAL
else:
# Solution failed, copy prior solution
Tmhe1[i] = Tmhe1[i-1]
Tmhe2[i] = Tmhe1[i-1]
K1s[i] = K1s[i-1]
K2s[i] = K2s[i-1]
K3s[i] = K3s[i-1]
tau12s[i] = tau12s[i-1]
tau3s[i] = tau3s[i-1]
# Write new heater values (0-100)
a.Q1(Q1s[i])
a.Q2(Q2s[i])
# Plot
plt.clf()
ax=plt.subplot(4,1,1)
ax.grid()
plt.plot(tm[0:i],T1m[0:i],'ro',label=r'$T_1$ measured')
plt.plot(tm[0:i],Tmhe1[0:i],'k-',label=r'$T_1$ MHE')
plt.plot(tm[0:i],T2m[0:i],'bx',label=r'$T_2$ measured')
plt.plot(tm[0:i],Tmhe2[0:i],'k--',label=r'$T_2$ MHE')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(4,1,2)
ax.grid()
plt.plot(tm[0:i],K1s[0:i],'k-',label='K1')
plt.plot(tm[0:i],K2s[0:i],'g:',label='K2')
plt.plot(tm[0:i],K3s[0:i]*100,'r--',label='K3 x 100')
plt.ylabel('Gains')
plt.legend(loc='best')
ax=plt.subplot(4,1,3)
ax.grid()
plt.plot(tm[0:i],tau12s[0:i],'b-',label=r'$\tau_{12}$')
plt.plot(tm[0:i],tau3s[0:i]*10,'r--',label=r'$\tau_3$ x 10')
plt.ylabel('Time constant')
plt.legend(loc='best')
ax=plt.subplot(4,1,4)
ax.grid()
plt.plot(tm[0:i],Q1s[0:i],'r-',label=r'$Q_1$')
plt.plot(tm[0:i],Q2s[0:i],'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
plt.draw()
plt.pause(0.05)
# Turn off heaters
a.Q1(0)
a.Q2(0)
save_txt(tm,Q1s,Q2s,T1m,T2m)
# Save figure
plt.savefig('tclab_mhe.png')
# Allow user to end loop with Ctrl-C
except KeyboardInterrupt:
# Disconnect from Arduino
a.Q1(0)
a.Q2(0)
print('Shutting down')
a.close()
plt.savefig('tclab_mhe.png')
# Make sure serial connection still closes when there's an error
except:
# Disconnect from Arduino
a.Q1(0)
a.Q2(0)
print('Error: Shutting down')
a.close()
plt.savefig('tclab_mhe.png')
raise
See also: