Second Order Systems
 |  |  |  |  |
|---|
A second-order linear system is a common description of many dynamic processes. The response depends on whether it is an overdamped, critically damped, or underdamped second order system.
$$\tau_s^2 \frac{d^2y}{dt^2} + 2 \zeta \tau_s \frac{dy}{dt} + y = K_p \, u\left(t-\theta_p \right)$$
has output y(t) and input u(t) and four unknown parameters. The four parameters are the gain `K_p`, damping factor `\zeta`, second order time constant `\tau_s`, and dead time `\theta_p`.
Laplace Domain, Transfer Function
In the Laplace domain, the second order system is a transfer function:
$$\frac{Y(s)}{U(s)} = \frac{K_p}{\tau_s^2 s^2 + 2 \zeta \tau_s s + 1}e^{-\theta_p s}$$
State Space Form
To put the second order equation into state space form, it is split into two first order differential equations.
$$\frac{dx_1}{dt} = x_2$$
$$\tau_s^2 \frac{dx_2}{dt} = -2 \zeta \tau_s x_2 - x_1 + K_p u\left(t-\theta_p\right)$$
State `x_1` is the output in state space form.
$$\begin{bmatrix}\dot x_1\\\dot x_2\end{bmatrix} = \begin{bmatrix}0&1\\-\frac{1}{\tau_s^2}&-\frac{2 \zeta}{\tau_s}\end{bmatrix} \begin{bmatrix}x_1\\x_2\end{bmatrix} + \begin{bmatrix}0\\\frac{K_p}{\tau_{s}^2}\end{bmatrix} u\left(t-\theta_p\right)$$
$$y = \begin{bmatrix}1 & 0\end{bmatrix} \begin{bmatrix}x_1\\x_2\end{bmatrix} + \begin{bmatrix}0\end{bmatrix} u$$
Process Gain, `K_p`
The process gain is the change in the output y induced by a unit change in the input u. The process gain is calculated by evaluating the change in y(t) divided by the change in u(t) at steady state initial and final conditions.
$$K_p = \frac{\Delta y}{\Delta u} = \frac{y_{ss_2}-y_{ss_1}}{u_{ss_2}-u_{ss_1}}$$
The process gain affects the magnitude of the response, regardless of the speed of response.
Damping Factor
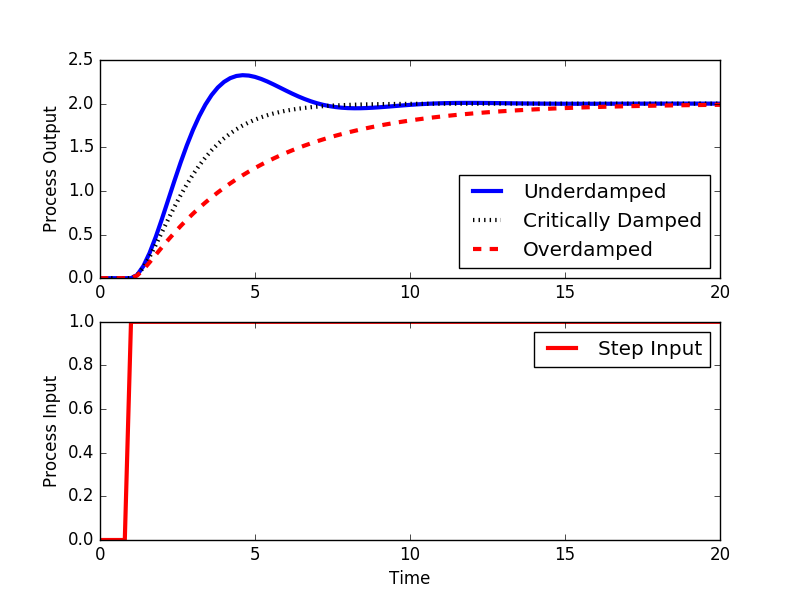
The response of the second order system to a step input in `u(t)` depends whether the system is overdamped `(\zeta>1)`, critically damped `(\zeta=1)`, or underdamped `(0 \le \zeta < 1)`.
1. Overdamped
If the system is overdamped `(\zeta>1)`, the analytic solution to the step response of magnitude M is
$$y(t) = K_p M \left( 1-e^{-\zeta\,t/\tau_s} \left[ \cosh\left( \frac{t}{\tau_s}\sqrt{\zeta^2 - 1} \right) + \frac{\zeta}{\sqrt{\zeta^2-1}} \sinh\left( \frac{t}{\tau_s}\sqrt{\zeta^2 - 1} \right) \right] \right)$$
2. Critically Damped
If the system is critically damped `(\zeta=1)`, the analytic solution to the step response of magnitude M is
$$y(t) = K_p M \left[ 1 - \left( 1+\frac{t}{\tau_s} \right) e^{-t/\tau_s} \right] $$
3. Underdamped (oscillations)
Finally, if the system is underdamped `(0\le\zeta<1)`, the analytic solution to the step response of magnitude M is
$$y(t) = K_p M \left( 1-e^{-\zeta\,t/\tau_s} \left[ \cos\left( \frac{t}{\tau_s}\sqrt{1-\zeta^2} \right) + \frac{\zeta}{\sqrt{1-\zeta^2}} \sin\left( \frac{t}{\tau_s}\sqrt{1-\zeta^2} \right) \right] \right)$$
Second Order Time Constant, `\tau_s`
The second order process time constant is the speed that the output response reaches a new steady state condition. An overdamped second order system may be the combination of two first order systems.
$$\tau_{p1} \frac{dx}{dt} = -x + K_p u \quad \quad \frac{X(s)}{U(s)}=\frac{K_p}{\tau_{p1}\,s + 1}$$
$$\tau_{p2} \frac{dy}{dt} = -y + x \quad \quad \frac{Y(s)}{X(s)}=\frac{1}{\tau_{p2}\,s + 1}$$
The combination of these two first order systems becomes $$\frac{Y(s)}{X(s)}\frac{X(s)}{U(s)}=\frac{Y(s)}{U(s)}=\\\left(\frac{K_p}{\tau_{p1}\,s + 1}\right) \left(\frac{1}{\tau_{p2}\,s + 1}\right) = \frac{K_p}{\tau_{p1}\tau_{p2}\,s^2 + \left(\tau_{p1}+\tau_{p2}\right)s + 1}$$
with `\tau_{p1}\tau_{p2} = \tau_s^2` and `\tau_{p1}+\tau_{p2} = 2 \zeta \tau_s` in second order form.
Process Time Delay, `\theta_p`
The time delay is expressed as a time shift in the input variable u(t).
$$u\left(t-\theta_p\right)$$
The effect of `\theta_p` is to delay the effect of `u(t)`. If `u(t)` is a unit step input that starts at `t=0` then `u(t-\theta_p)` would be a step input that shifts from 0 to 1 at `t=\theta_p`. A time delay adds `e^{-\theta_p \,s }` to the second order transfer function. In the time domain, it replaces any variable `t` with `t-\theta_p` and the output response is multiplied by the step function `S(t-\theta_p)`.
Fit Second Order Model to Data
Two popular methods to fit data or more complex models to a second order system is with a graphical method and step data or with optimization techniques.
Simulate Second Order System
import matplotlib.pyplot as plt
from scipy.integrate import odeint
# specify number of steps
ns = 100
# define time points
t = np.linspace(0,ns/5.0,ns+1)
class model(object):
# default process model
Kp = 2.0
taus = 1.0
thetap = 0.0
zeta = 1.0
def process(x,t,u,Kp,taus,zeta):
# Kp = process gain
# taus = second order time constant
# zeta = damping factor
# ts^2 dy2/dt2 + 2 zeta taus dydt + y = Kp u(t-thetap)
y = x[0]
dydt = x[1]
dy2dt2 = (-2.0*zeta*taus*dydt - y + Kp*u)/taus**2
return [dydt,dy2dt2]
def calc_response(t,m):
# t = time points
# m = process model
Kp = m.Kp
taus = m.taus
thetap = m.thetap
zeta = m.zeta
print('Kp: ' + str(Kp))
print('taus: ' + str(taus))
print('zeta: ' + str(zeta))
# specify number of steps
ns = len(t)-1
delta_t = t[1]-t[0]
# storage for recording values
op = np.zeros(ns+1) # controller output
pv = np.zeros((ns+1,2)) # process variable
# step input
op[5:]=1.0
# Simulate time delay
ndelay = int(np.ceil(thetap / delta_t))
# loop through time steps
for i in range(0,ns):
# implement time delay
iop = max(0,i-ndelay)
inputs = (op[iop],Kp,taus,zeta)
y = odeint(process,pv[i],[0,delta_t],args=inputs)
pv[i+1] = y[-1]
return (pv,op)
# overdamped step response
model.zeta = 2.0
(pv1,op1) = calc_response(t,model)
# critically damped step response
model.zeta = 1.0
(pv2,op2) = calc_response(t,model)
# underdamped step response
model.zeta = 0.5
(pv3,op3) = calc_response(t,model)
plt.figure(1)
plt.subplot(2,1,1)
plt.plot(t,pv3[:,0],'b-',linewidth=3,label='Underdamped')
plt.plot(t,pv2[:,0],'k:',linewidth=3,label='Critically Damped')
plt.plot(t,pv1[:,0],'r--',linewidth=3,label='Overdamped')
plt.legend(loc='best')
plt.ylabel('Process Output')
plt.subplot(2,1,2)
plt.plot(t,op1,'r-',linewidth=3,label='Step Input')
plt.legend(loc='best')
plt.ylabel('Process Input')
plt.xlabel('Time')
plt.savefig('output.png')
plt.show()