Practice Midterm Exam 3
Main.MidtermExam2023 History
Hide minor edits - Show changes to markup

(:html:) <iframe width="560" height="315" src="https://www.youtube.com/embed/jmqtv0M7MkU" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> (:htmlend:)
(:html:) <iframe width="560" height="315" src="https://www.youtube.com/embed/WpAY8TGt2Ks" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> (:htmlend:)
<iframe width="560" height="315" src="https://www.youtube.com/embed/AzZOi87tYYA" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>
from gekko import GEKKO import numpy as np
m = GEKKO(remote=False) x10 = 0; x20 = 1 u, x11, x12, x21, x22, dx11, dx12, dx21, dx22 = m.Array(m.Var,9) u.value = 1; x11.value = 1; x12.value = 1; x21.value = 1; x22.value = 1
N = np.array()
m.Equations([np.dot(N[0],[dx11, dx12]) == x11 - x10,
np.dot(N[1],[dx11, dx12]) == x12 - x10,
np.dot(N[0],[dx21, dx22]) == x21 - x20,
np.dot(N[1],[dx21, dx22]) == x22 - x20,
5*dx11 == -x11 + 2*u**2,
5*dx12 == -x12 + 2*u**2,
3*dx21 == -x21 + x11**2,
3*dx22 == -x22 + x12**2,
x22-5 == 0])
m.solve(disp=False) print(u[0]) print(x10, x11[0], x12[0]) print(x20, x21[0], x22[0]) print(dx11[0], dx12[0], dx21[0], dx22[0])
from gekko import GEKKO import matplotlib.pyplot as plt import numpy as np
- Initialize Model
m = GEKKO()
nt = 101 m.time = np.linspace(0,1,nt)
- Parameters
u = m.MV(value=-6) u.STATUS = 1
- Variables
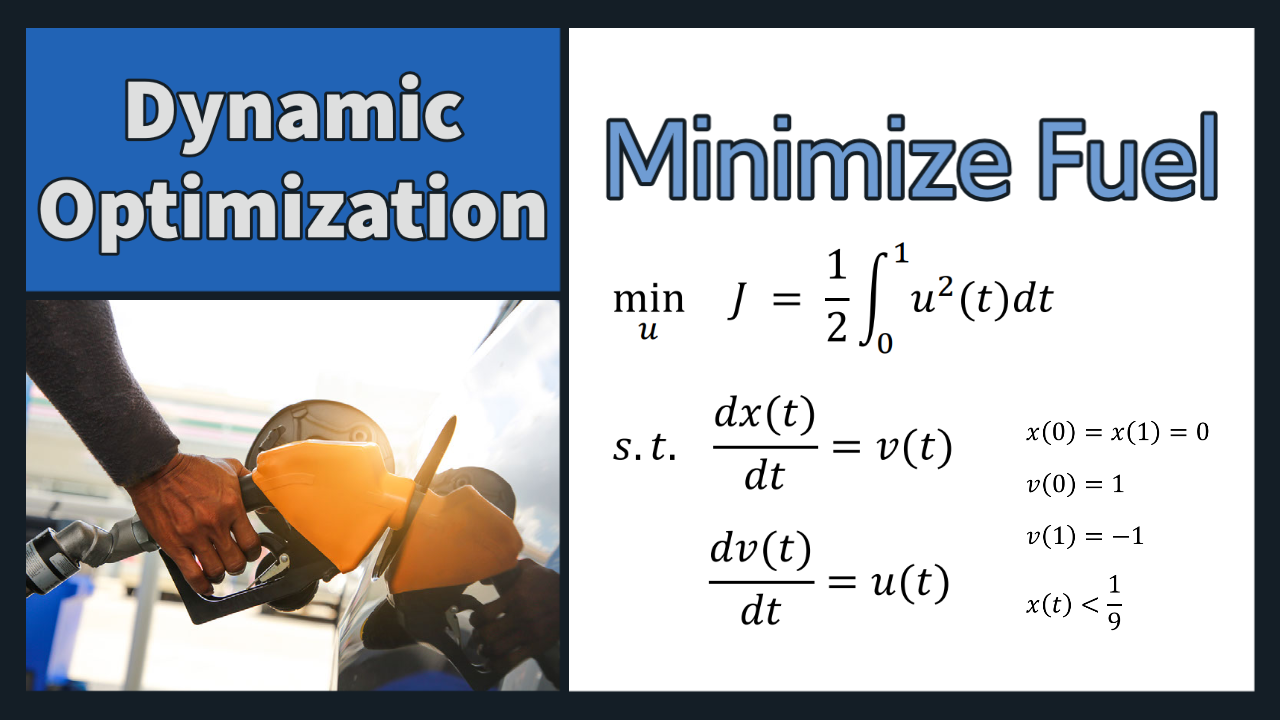
x = m.Var(value=0,ub=1/9) v = m.Var(value=1)
J = m.Intermediate(0.5*m.integral(u**2))
p = np.zeros(nt) p[-1] = 1.0 final = m.Param(value=p)
- Equations
m.Equation(x.dt() == v) m.Equation(v.dt() == u)
m.Equation(final*x==0) m.Equation(final*(v+1)==0)
- ,or
- m.Minimize(final*1e5*x**2)
- m.Minimize(final*1e5*(v+1)**2)
- Objective Function
m.Minimize(final*J)
- Options
m.options.IMODE = 6 m.options.NODES = 2 m.options.SOLVER = 1
m.solve(disp=False)
print('Final Objective Function Value:', J.value[-1])
- Create a figure
plt.figure(figsize=(10,4)) plt.subplot(2,2,1) plt.plot([0,1],[1/9,1/9],'r:',label=r'$x<\frac{1}{9}$') plt.plot(m.time,x.value,'k-',lw=2,label=r'$x$') plt.ylabel('Position') plt.legend(loc='best') plt.subplot(2,2,2) plt.plot(m.time,v.value,'b--',lw=2,label=r'$v$') plt.ylabel('Velocity') plt.legend(loc='best') plt.subplot(2,2,3) plt.plot(m.time,u.value,'r--',lw=2,label=r'$u$') plt.ylabel('Thrust') plt.legend(loc='best') plt.xlabel('Time') plt.subplot(2,2,4) plt.plot(m.time,J.value,'g-',lw=2,label=r'$\frac{1}{2} \int u^2$') plt.text(0.5,3.0,'Final Value = '+str(np.round(J.value[-1],2))) plt.ylabel('Objective') plt.legend(loc='best') plt.xlabel('Time') plt.show()
import numpy as np from gekko import GEKKO import matplotlib.pyplot as plt
- data from problem statement
time = np.array([0, 5, 10, 20, 30, 40, 50, 60, 90, 120,
150, 180, 240, 300, 360, 480, 600, 720])
Cc_meas = np.array([0,0.57, 0.78, 0.92, 1.04, 1.19, 1.29,
1.36, 1.59, 1.68, 1.84, 1.96, 2.01, 2.13,
2.21, 5.32, 2.38, 2.44])
m = GEKKO(remote=True)
m.time = time
Kf = m.FV(value =0.0025, lb = 0, ub = 0.01) Kb = m.FV(value =0.0025, lb = 0, ub = 0.01) Kf.STATUS = 1 Kb.STATUS = 1
Ca = m.Var(value = 4.84) Cb = m.Var(value = 9.67) Cd = m.Var(value = 0)
Cc = m.CV(Cc_meas) Cc.FSTATUS = 1
- Reaction equations
m.Equation(Cc.dt() == Kf*Ca*(Cb**2) - Kb*Cc*Cd) m.Equation(Ca.dt() == -Cc.dt()) m.Equation(Cb.dt() == -2*Cc.dt()) m.Equation(Cd.dt() == Cc.dt())
- turn GEKKO mode to estimation
m.options.IMODE = 5 m.options.NODES = 4 m.options.EV_TYPE = 1 #2 = Sum of squared error, 1 = Sum of absoluted error
m.solve(disp=False)
- solve and plot
plt.figure() plt.subplot(2,1,1) plt.plot(m.time, Ca.value, label = 'Ca') plt.plot(m.time, Cb.value, label = 'Cb') plt.ylabel('Concentration (mol/L)') plt.legend(); plt.grid() plt.subplot(2,1,2) plt.plot(m.time, Cc.value, label = 'Cc') plt.plot(m.time, Cc_meas, 'ro', label = 'Cc Data') plt.ylabel('Concentration (mol/L)') plt.xlabel('Time (min)') plt.legend(); plt.grid() plt.ylabel('Concentration (mol/L)') plt.tight_layout() plt.savefig('regression.png',dpi=300)
print("Kf = " + str(Kf.value[0])) print("Kb = " + str(Kb.value[0]))
 Midterm Solution Notebook
Midterm Solution Notebook Jupyter Notebook in Google Colab Midterm Solution Notebook Google Colab
Jupyter Notebook in Google Colab Midterm Solution Notebook Google Colab Midterm Solution Notebook Jupyter Notebook in Google Colab
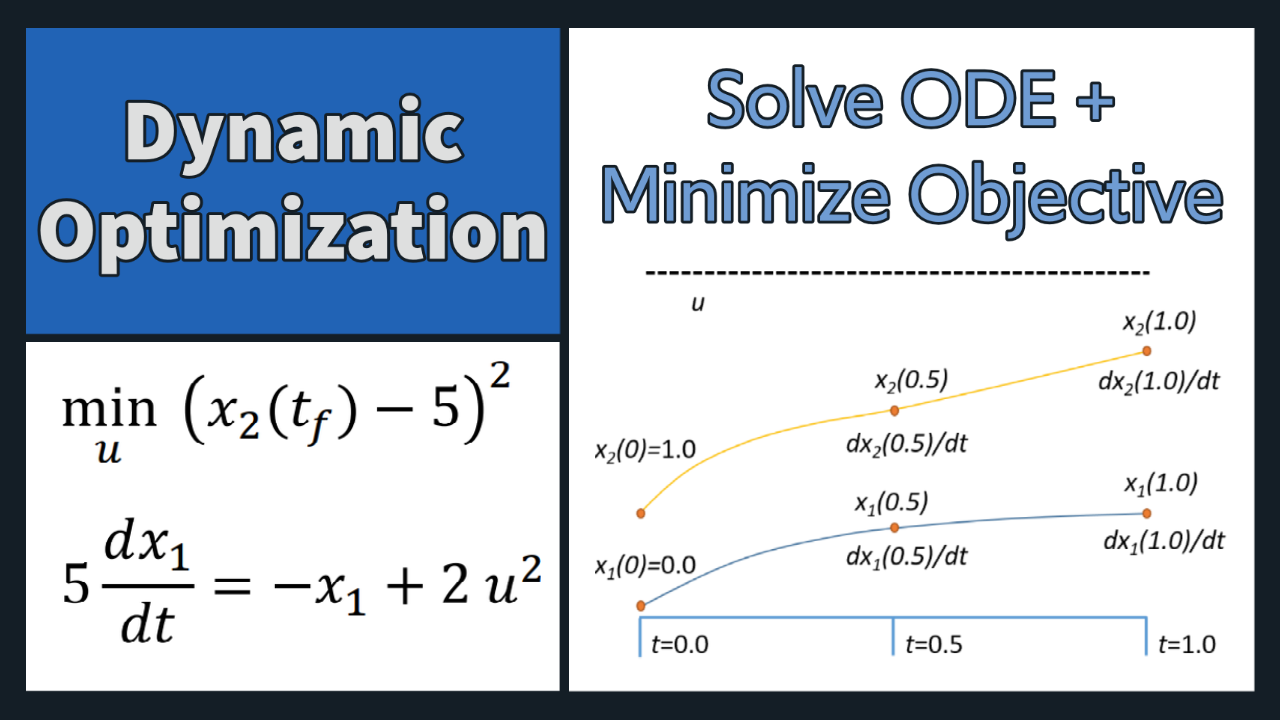
Midterm Solution Notebook Jupyter Notebook in Google ColabProblem 2 Solution (Dynamic Optimization Benchmark)
Problem 2 Solution (Dynamic Optimization)
Problem 2 Solution (Benchmark)
Problem 2 Solution (Dynamic Optimization Benchmark)

(:title Practice Midterm Exam 3 for Dynamic Optimization:)
(:title Practice Midterm Exam 3:)
(:title Practice Midterm Exam 3 for Dynamic Optimization:) (:keywords Python, optimal control, outlier, nonlinear control, model predictive control, exam, midterm:) (:description Practice Mid-term exam 3 for dynamic estimation and optimization as a graduate-level course.:)
Midterm Exam 3
Problem 1 Solution (Orthogonal Collocation)
(:toggle hide gekko1 button show="Show Solution Code":) (:div id=gekko1:) (:source lang=python:)
(:sourceend:) (:divend:)
(:html:) (:htmlend:)
Problem 2 Solution (Benchmark)
(:toggle hide gekko2 button show="Show Solution Code":) (:div id=gekko2:) (:source lang=python:)
(:sourceend:) (:divend:)
Problem 3 Solution (Regression with Outlier)
(:toggle hide gekko3 button show="Show Solution Code":) (:div id=gekko3:) (:source lang=python:)
(:sourceend:) (:divend:)