Level Regulation with MPC
Main.LevelControl History
Hide minor edits - Show changes to markup
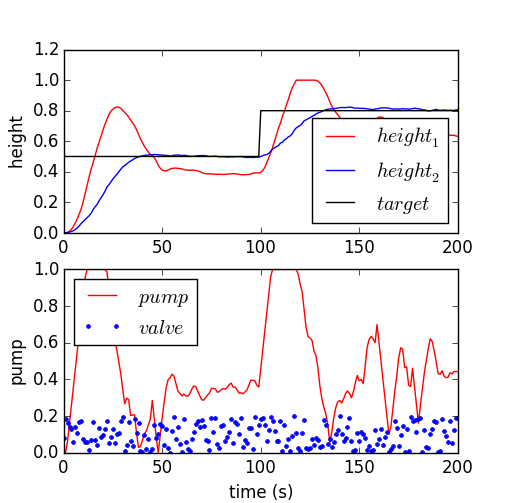
Develop a model predictive controller (MPC) to reach a level set point for tank 2 (e.g. 50% full, level=0.5), initially starting from empty tanks. Tune the controller for satisfactory performance with setpoint changes in the level or with disturbances to the valve position (`\gamma_1`). Demonstrate the control performance and discuss methods used to achieve satisfactory control during startup from empty and with valve position changes (show both of these).
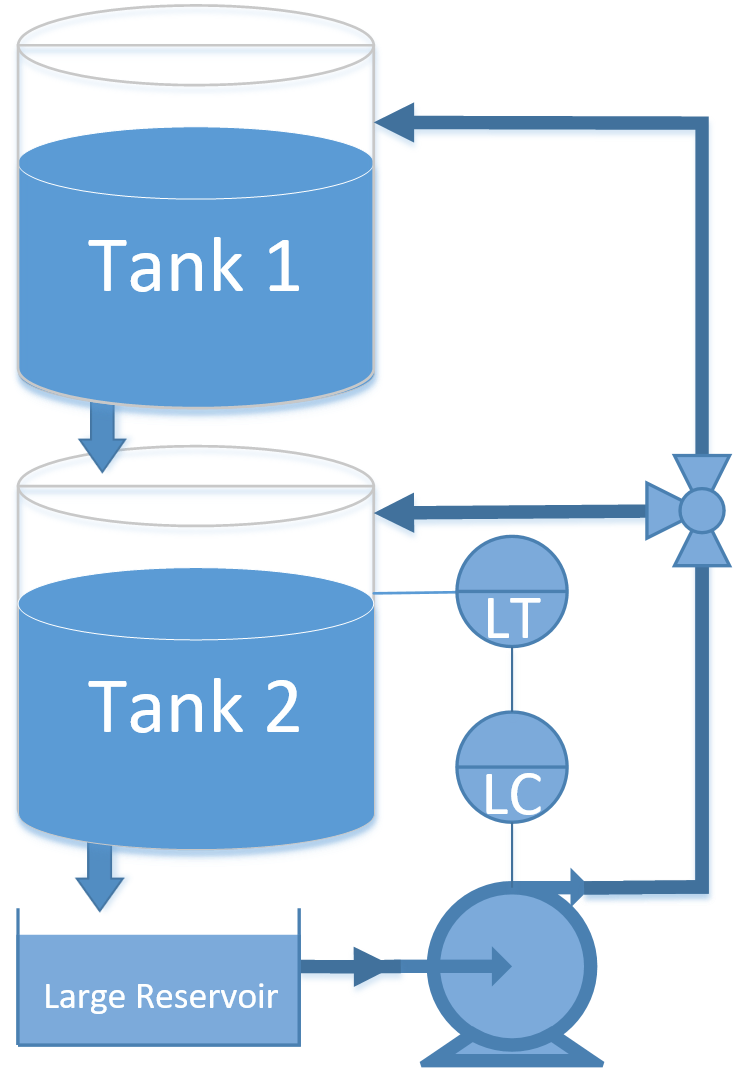
Pumped-storage hydroelectricity is a promising method to improve energy dispatch potential with increasing renewable sources such as wind and solar. The following application is a dual reservoir system with pumped water that either enters the upper or lower reservoir.
You are asked to develop a model predictive controller (MPC) to reach a level set point for tank 2 (e.g. 50% full, level=0.5), initially starting from empty tanks. Tune the controller for satisfactory performance with setpoint changes in the level or with disturbances to the valve position (`\gamma_1`). Demonstrate the control performance and discuss methods used to achieve satisfactory control during startup from empty and with valve position changes (show both of these).
(:html:) <iframe width="560" height="315" src="https://www.youtube.com/embed/YvU3Rd3JBc0" frameborder="0" allow="autoplay; encrypted-media" allowfullscreen></iframe> (:htmlend:)
where 1 and 2 refer to the tanks, `\tau_1` and `\tau_2` are time constants, `K_1` and `K_2` are gains, `h_1` and `h_2` are liquid level heights, and p is the pump flow between 0 and 1.
where 1 and 2 refer to the tanks, `\tau_1=18.4` and `\tau_2=24.4` are time constants, `K_1=1.3` and `K_2=1.0` are gains, `h_1` and `h_2` are liquid level heights, and p is the pump flow between 0 and 1.
h1 = m.SV(value=0)
h1 = m.Var(value=0.0)
h2 = m.CV(value=0)
h2 = m.CV(value=0.0)
h2.TR_INIT = 1
m.options.CV_TYPE = 1
m.options.CV_TYPE = 2
print('h2: ' + str(h2.MEAS))
h2.SP = sp[i]
print('pump: ' + str(pump[i]))
if (i%5==1):
if (i%5==3):

(:html:) <iframe width="560" height="315" src="https://www.youtube.com/embed/U7uyj9BaNKg" frameborder="0" allowfullscreen></iframe> (:htmlend:)
Python (APM) Solution
Simulink Solution
(:html:) <iframe width="560" height="315" src="https://www.youtube.com/embed/U7uyj9BaNKg" frameborder="0" allowfullscreen></iframe> (:htmlend:)
$$\tau_{1} * \frac{h_1}{dt} = -h_1 + K_1 \, p$$ $$\tau_{2} * \frac{h_2}{dt} = -h_2 + K_2 \, h_1$$
$$\tau_{1} \frac{h_1}{dt} = -h_1 + K_1 \, p$$ $$\tau_{2} \frac{h_2}{dt} = -h_2 + K_2 \, h_1$$
(:title Level Regulation with MPC:) (:keywords Python, MATLAB, linear control, model predictive control, level, height, liquid, dynamic programming:) (:description Design a model predictive controller for level control in a dual tank system. Show that the controller is able to maintain a set point that changes at frequent intervals.:)
Develop a model predictive controller (MPC) to reach a level set point for tank 2 (e.g. 50% full, level=0.5), initially starting from empty tanks. Tune the controller for satisfactory performance with setpoint changes in the level or with disturbances to the valve position (`\gamma_1`). Demonstrate the control performance and discuss methods used to achieve satisfactory control during startup from empty and with valve position changes (show both of these).
A pump transports water to tank 1 where it drains to tank 2. Both tanks have an opening at the bottom that allows liquid to flow out. A valve is used to divert pumped liquid into tank 1 (valve position=0), into tank 2 (valve position=1) or fractionally into both (valve position 0-1). The valve position is not available to the controller as a measurement and is considered a disturbance to the process. Only the level of tank 2 (bottom tank) is available as a measured value. The pump rate can be manipulated between 0 and 1. The pump has a maximum rate of change of 0.1 every second.
For control you can use linear or nonlinear model predictive control. For estimation, you can use moving horizon estimation (MHE) or simple bias updating. The simplest option is linear MPC with bias updating. The following is a linear second order model that approximates the level dynamics.
$$\tau_{1} * \frac{h_1}{dt} = -h_1 + K_1 \, p$$ $$\tau_{2} * \frac{h_2}{dt} = -h_2 + K_2 \, h_1$$
where 1 and 2 refer to the tanks, `\tau_1` and `\tau_2` are time constants, `K_1` and `K_2` are gains, `h_1` and `h_2` are liquid level heights, and p is the pump flow between 0 and 1.
Python (GEKKO Solution)
(:toggle hide gekko button show="Show GEKKO (Python) Code":) (:div id=gekko:) (:source lang=python:) import numpy as np import matplotlib.pyplot as plt from scipy.integrate import odeint import csv from gekko import GEKKO
- create MPC with GEKKO
m = GEKKO() m.time = [0,1,2,4,8,12,16,20]
- empirical constants
Kp_h1 = 1.3 tau_h1 = 18.4 Kp_h2 = 1 tau_h2 = 24.4
- manipulated variable
p = m.MV(value=0,lb=1e-5,ub=1) p.STATUS = 1 p.DCOST = 0.01 p.FSTATUS = 0
- unmeasured state
h1 = m.SV(value=0)
- controlled variable
h2 = m.CV(value=0) h2.STATUS = 1 h2.FSTATUS = 1 h2.TAU = 20
- equations
m.Equation(tau_h1*h1.dt()==-h1 + Kp_h1*p) m.Equation(tau_h2*h2.dt()==-h2 + Kp_h2*h1)
- options
m.options.IMODE = 6 m.options.CV_TYPE = 1
- simulated system (for measurements)
def tank(levels,t,pump,valve):
h1 = max(1.0e-10,levels[0])
h2 = max(1.0e-10,levels[1])
c1 = 0.08 # inlet valve coefficient
c2 = 0.04 # tank outlet coefficient
dhdt1 = c1 * (1.0-valve) * pump - c2 * np.sqrt(h1)
dhdt2 = c1 * valve * pump + c2 * np.sqrt(h1) - c2 * np.sqrt(h2)
if h1>=1.0 and dhdt1>0.0:
dhdt1 = 0
if h2>=1.0 and dhdt2>0.0:
dhdt2 = 0
dhdt = [dhdt1,dhdt2]
return dhdt
- Initial conditions (levels)
h0 = [0,0]
- Time points to report the solution
tf = 400 t = np.linspace(0,tf,tf+1)
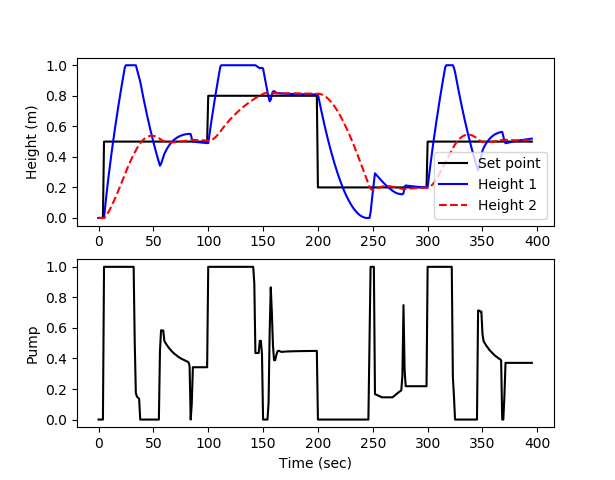
- Set point
sp = np.zeros(tf+1) sp[5:100] = 0.5 sp[100:200] = 0.8 sp[200:300] = 0.2 sp[300:] = 0.5
- Inputs that can be adjusted
pump = np.zeros(tf+1)
- Disturbance
valve = 0.0
- Record the solution
y = np.zeros((tf+1,2)) y[0,:] = h0
- Create plot
plt.figure(figsize=(10,7)) plt.ion() plt.show()
- Simulate the tank step test
for i in range(1,tf):
#########################
# MPC ###################
#########################
# measured height
h2.MEAS = y[i,1]
print('h2: ' + str(h2.MEAS))
# set point deadband
h2.SPHI = sp[i]+0.01
h2.SPLO = sp[i]-0.01
# solve MPC
m.solve(disp=False)
# retrieve 1st pump new value
pump[i] = p.NEWVAL
print('pump: ' + str(pump[i]))
#########################
# System ################
#########################
# Specify the pump and valve
inputs = (pump[i],valve)
# Integrate the model
h = odeint(tank,h0,[0,1],inputs)
# Record the result
y[i+1,:] = h[-1,:]
# Reset the initial condition
h0 = h[-1,:]
# update plot every 5 cycles
if (i%5==1):
plt.clf()
plt.subplot(2,1,1)
plt.plot(t[0:i],sp[0:i],'k-')
plt.plot(t[0:i],y[0:i,0],'b-')
plt.plot(t[0:i],y[0:i,1],'r--')
plt.ylabel('Height (m)')
plt.legend(['Set point','Height 1','Height 2'])
plt.subplot(2,1,2)
plt.plot(t[0:i],pump[0:i],'k-')
plt.ylabel('Pump')
plt.xlabel('Time (sec)')
plt.draw()
plt.pause(0.01)
- Construct and save data file
data = np.vstack((t,pump)) data = np.hstack((np.transpose(data),y)) np.savetxt('data.txt',data,delimiter=',') (:sourceend:) (:divend:)