TCLab On/Off Control
 |  | |  |  |  |
|---|
Objective: Generate data from an On/Off controller and determine the parameters of a 2nd order underdamped model that best fits the response.
On/off control is used in most cooling and heating applications where the actuator can only be On or Off. Run the temperature control lab with On/Off control for 4 minutes to reach a setpoint of 40oC.
On/Off Control (4 min)
import time
a = tclab.TCLab() # connect to TCLab
fid = open('data.csv','w')
fid.write('Time,Q1,T1\n')
fid.write('0,0,'+str(a.T1)+'\n')
fid.close()
for i in range(240): # 4 minute test
time.sleep(1)
T1 = a.T1 # temperature
Q1 = 100 if T1<=40.0 else 0 # On/Off Control
a.Q1(Q1) # set heater
print('Time: '+str(i)+' Q1: '+str(Q1)+' T1 (SP=40): '+str(T1))
fid = open('data.csv','a')
fid.write(str(i)+','+str(Q1)+','+str(T1)+'\n')
fid.close()
a.close()
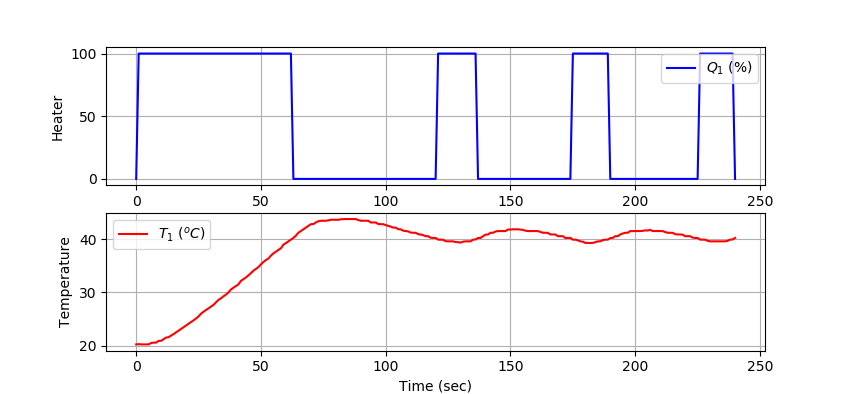
Generate Plot
import pandas as pd
data = pd.read_csv('data.csv')
plt.figure(figsize=(10,7))
ax=plt.subplot(2,1,1); ax.grid()
plt.plot(data['Time'],data['Q1'],'b-',label=r'$Q_1$ (%)')
plt.legend(); plt.ylabel('Heater')
ax=plt.subplot(2,1,2); ax.grid()
plt.plot(data['Time'],data['T1'],'r-',label=r'$T_1$ $(^oC)$')
plt.legend(); plt.xlabel('Time (sec)'); plt.ylabel('Temperature')
plt.show()
Use a graphical method to fit a 2nd order model to the closed-loop response by finding `K_p`, `\zeta`, and `\tau_s`. Dead-time `\theta_p` is not needed for this model.
$$\tau_s^2 \frac{d^2T_1}{dt^2} + 2 \zeta \tau_s \frac{dT_1}{dt} + T_1 = K_p \, Q_1$$
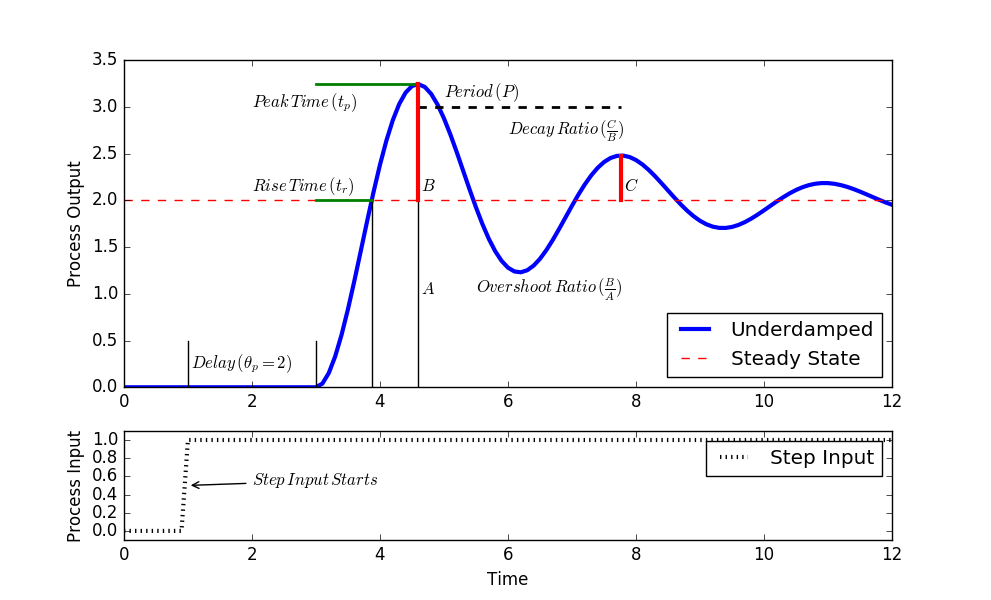
Follow the steps to obtain a graphical approximation of a step response of the underdamped (oscillating) second order system. An underdamped system implies that `0 \ge \zeta > 1`.
- Find `\Delta T_1` from step response.
- Find `\Delta T_{SP}` as the input to the step response.
- Calculate `K_p = {\Delta T_1}/{\Delta T_{SP}`.
- Calculate damping factor `\zeta` from overshoot `OS` or decay ratio `DR`.
- Calculate `\tau_s` from equations for rise time `t_r`, peak time `t_p`, or period `P`.
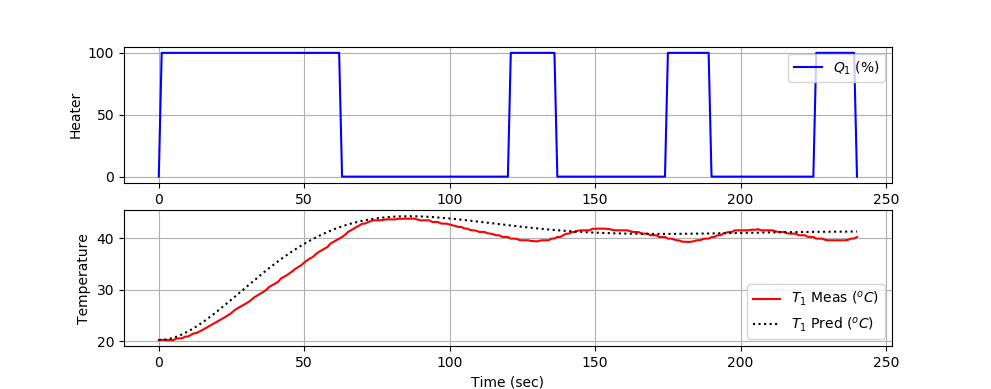
Add the underdamped `(0\le\zeta<1)` analytic solution to data plot to compare the graphical fit to the data. See Second Order Systems for additional information on analytic solutions.
$$T'_1(t) = K_p \Delta T_{SP} \left( 1-e^{-\zeta\,t/\tau_s} \left[ \cos\left( \frac{t}{\tau_s}\sqrt{1-\zeta^2} \right) + \frac{\zeta}{\sqrt{1-\zeta^2}} \sin\left( \frac{t}{\tau_s}\sqrt{1-\zeta^2} \right) \right] \right)$$
Solution
1. Find `\Delta T_1` from step response.
2. Find `\Delta T_{SP}` as the input of the step response.
3. Calculate `K_p = {\Delta T_1}/{\Delta T_{SP}`.
4. Calculate damping factor `\zeta` from overshoot `OS` or decay ratio `DR`.
$$\zeta = \sqrt{\frac{\left(\ln(OS)\right)^2}{\pi^2 + \left(\ln(OS)\right)^2}} = 0.527$$
5. Calculate `\tau_s` from the equation peak time `t_p`.
$$\tau_s = \frac{\sqrt{1-\zeta^2}}{\pi}t_p = 23.2$$
import pandas as pd
import numpy as np
data = pd.read_csv('data.csv')
# graphical fit
Delta_SP = 20
Delta_T1 = 21
OS = (44-41)/(41-20)
tp = 86.0
Kp = Delta_T1/Delta_SP
lnOS2 = (np.log(OS))**2
zeta = np.sqrt(lnOS2/(np.pi**2+lnOS2))
taus = tp * np.sqrt(1-zeta**2)/np.pi
print('Kp: ' + str(Kp))
print('zeta: ' + str(zeta))
print('taus: ' + str(taus))
# analytic solution
t = data['Time'].values
T0 = data['T1'].values[0]
a = np.sqrt(1-zeta**2)
b = t/taus
c = np.cos(a*b)
d = (zeta/a)*np.sin(a*b)
T1 = Kp*Delta_SP*(1-np.exp(-zeta*b)*(c+d))+T0
plt.figure(figsize=(10,7))
ax=plt.subplot(2,1,1); ax.grid()
plt.plot(data['Time'],data['Q1'],'b-',label=r'$Q_1$ (%)')
plt.legend(); plt.ylabel('Heater')
ax=plt.subplot(2,1,2); ax.grid()
plt.plot(data['Time'],data['T1'],'r-',label=r'$T_1$ Meas $(^oC)$')
plt.plot(t,T1,'k:',label=r'$T_1$ Pred $(^oC)$')
plt.legend(); plt.xlabel('Time (sec)'); plt.ylabel('Temperature')
plt.show()
What to Turn In
- Item 1: Recorded On/Off control data file (data.csv) showing temperature and heater output over the 4-minute test.
- Item 2: Plot of measured heater output (Q₁) and temperature (T₁) versus time.
- Item 3: Calculations of ΔT₁, `ΔT_{SP}`, process gain (Kₚ), damping factor (ζ), and second-order time constant (τₛ) using the graphical method.
- Item 4: Analytic second-order underdamped model equation using the identified parameters.
- Item 5: Overlay plot comparing the measured T₁ response and the analytic model prediction.
- Item 6: Short discussion of how well the second-order model fits the On/Off control response and possible sources of deviation.