Graphical Method: FOPDT to Step Test
 |  | | |  |  |
|---|
Dynamic processes are often characterized by a gain `(K_c)`, time constant `(\tau_p)`, and sometimes dead-time `(\theta_p)`. Use a graphical fitting method to estimate the three characteristic parameters of the following dynamic systems described by a first-order linear system with time delay.
$$\tau_p \frac{dy(t)}{dt} = -y(t) + K_p u\left(t-\theta_p\right)$$
For unstable or oscillatory responses, the first order linear equation does not represent the input to output relationship in the data. Indicate any system responses that are not a good fit for this equation form. Follow the following steps when fitting the parameters `K_p, \tau_p, \theta_p` to a step response.
- Find `\Delta y` from step response
- Find `\Delta u` from step response
- Calculate `K_p = {\Delta y} / {\Delta u}`
- Find `\theta_p`, apparent dead time, from step response
- Find `0.632 \Delta y` from step response
- Find `t_{0.632}` for `y(t_{0.632}) = 0.632 \Delta y` from step response
- Calculate `\tau_p = t_{0.632} - \theta_p`. This assumes that the step starts at `t=0`. If the step happens later, subtract the step time as well.
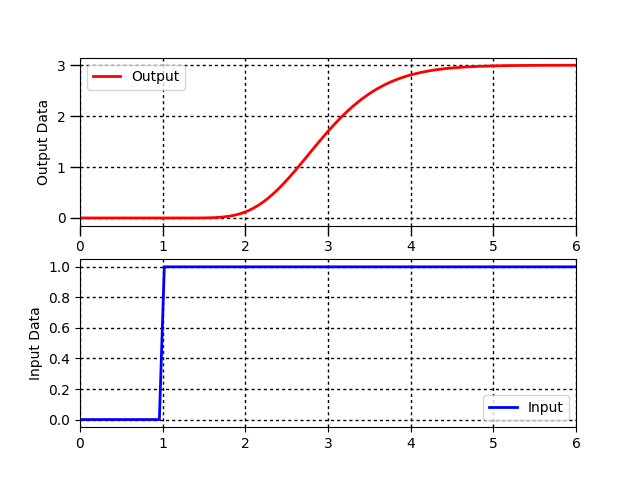
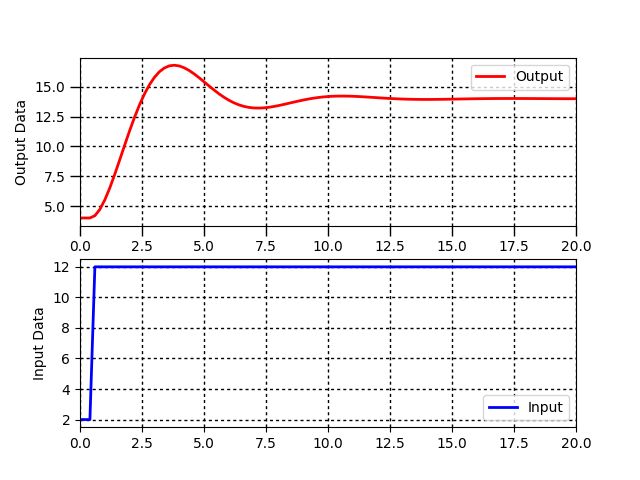
Problem 1
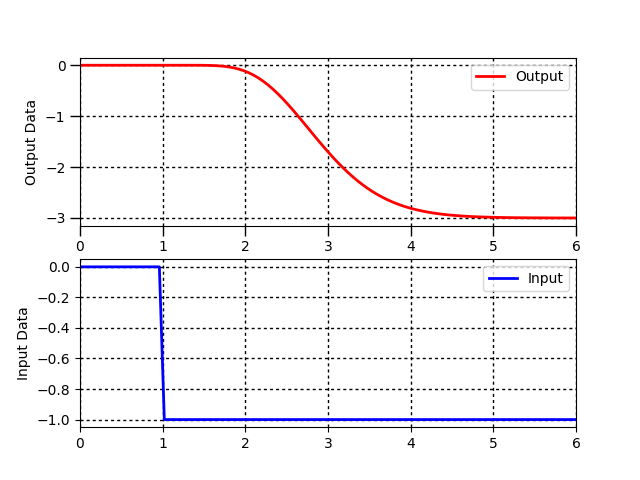
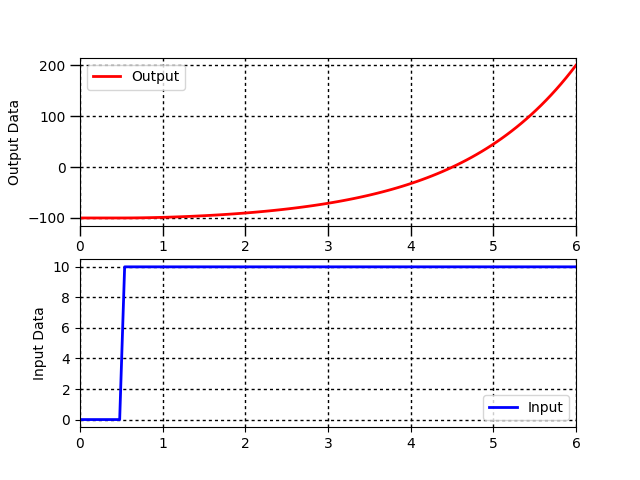
Problem 2
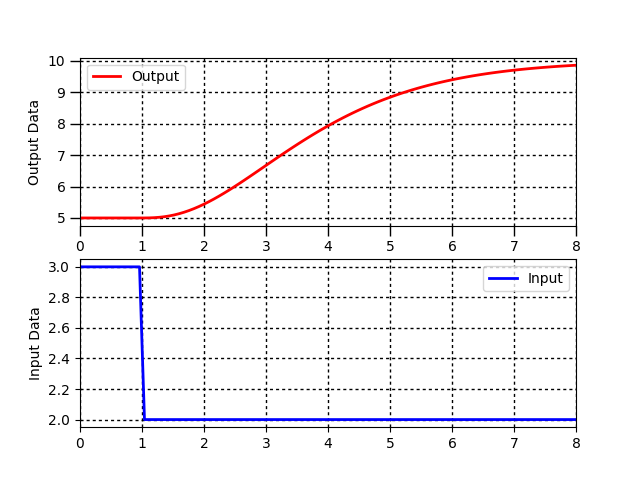
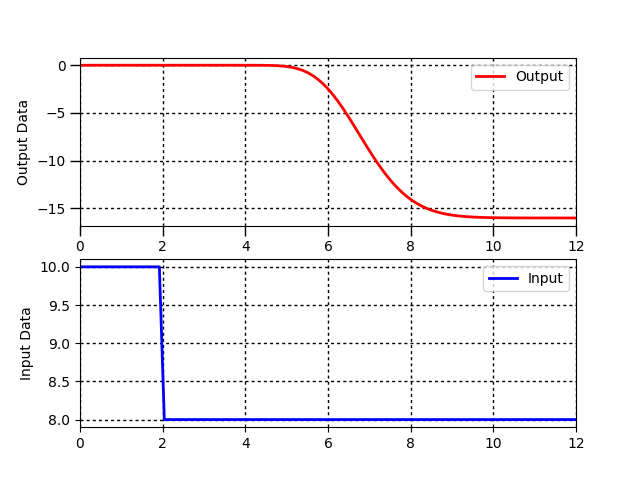
Problem 3
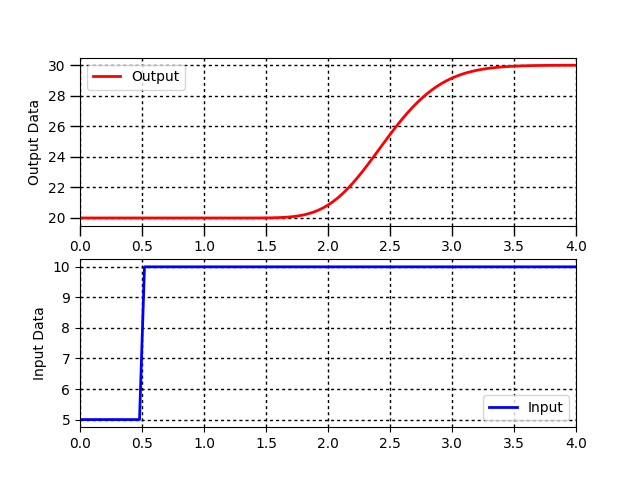
Problem 4
Problem 5
Problem 6
Problem 7
Solution