The TCLab is a hands-on application of machine learning and advanced temperature control with two heaters and two temperature sensors. The labs reinforce principles of model development, estimation, and advanced control methods. This is the second exercise to simulate an energy balance and compare the predictions to deep learning with a multi-layered neural network. The additional feature over the first lab is that the model is extended to two heaters and two temperature sensors.
Lab Problem Statement
Data and Solutions
- MIMO Energy Balance Solution with MATLAB and Python
- Steady state data, 2 heaters
- Dynamic data, 2 heaters
import numpy as np
import pandas as pd
import tclab
import time
import matplotlib.pyplot as plt
# generate step test data on Arduino
filename = 'tclab_dyn_data2.csv'
# heater steps
Q1d = np.zeros(601)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q2d = np.zeros(601)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Time,H1,H2,T1,T2\n')
fid.close()
# run step test (10 min)
for i in range(601):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + \
' H1: ' + str(Q1d[i]) + \
' H2: ' + str(Q2d[i]) + \
' T1: ' + str(a.T1) + \
' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+','+str(Q1d[i])+','+str(Q2d[i])+',' \
+str(a.T1)+','+str(a.T2)+'\n')
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# plot measurements
plt.figure()
plt.subplot(2,1,1)
plt.plot(data['Time'],data['H1'],'r-',label='Heater 1')
plt.plot(data['Time'],data['H2'],'b--',label='Heater 2')
plt.ylabel('Heater (%)')
plt.legend(loc='best')
plt.subplot(2,1,2)
plt.plot(data['Time'],data['T1'],'r.',label='Temperature 1')
plt.plot(data['Time'],data['T2'],'b.',label='Temperature 2')
plt.ylabel('Temperature (degC)')
plt.legend(loc='best')
plt.xlabel('Time (sec)')
plt.savefig('tclab_dyn_meas2.png')
plt.show()
import pandas as pd
import tclab
import time
import matplotlib.pyplot as plt
# generate step test data on Arduino
filename = 'tclab_dyn_data2.csv'
# heater steps
Q1d = np.zeros(601)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q2d = np.zeros(601)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Time,H1,H2,T1,T2\n')
fid.close()
# run step test (10 min)
for i in range(601):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + \
' H1: ' + str(Q1d[i]) + \
' H2: ' + str(Q2d[i]) + \
' T1: ' + str(a.T1) + \
' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+','+str(Q1d[i])+','+str(Q2d[i])+',' \
+str(a.T1)+','+str(a.T2)+'\n')
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# plot measurements
plt.figure()
plt.subplot(2,1,1)
plt.plot(data['Time'],data['H1'],'r-',label='Heater 1')
plt.plot(data['Time'],data['H2'],'b--',label='Heater 2')
plt.ylabel('Heater (%)')
plt.legend(loc='best')
plt.subplot(2,1,2)
plt.plot(data['Time'],data['T1'],'r.',label='Temperature 1')
plt.plot(data['Time'],data['T2'],'b.',label='Temperature 2')
plt.ylabel('Temperature (degC)')
plt.legend(loc='best')
plt.xlabel('Time (sec)')
plt.savefig('tclab_dyn_meas2.png')
plt.show()
import numpy as np
import matplotlib.pyplot as plt
from gekko import GEKKO
#initialize GEKKO model
m = GEKKO()
#model discretized time
n = 60*10+1 # Number of second time points (10min)
m.time = np.linspace(0,n-1,n) # Time vector
# Parameters
# Percent Heater (0-100%)
Q1d = np.zeros(n)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q1 = m.Param()
Q1.value = Q1d
Q2d = np.zeros(n)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
Q2 = m.Param()
Q2.value = Q2d# Heaters as time-varying inputs
Q1 = m.Param(value=Q1d) # Percent Heater (0-100%)
Q2 = m.Param(value=Q2d) # Percent Heater (0-100%)
T0 = m.Param(value=19.0+273.15) # Initial temperature
Ta = m.Param(value=19.0+273.15) # K
U = m.Param(value=10.0) # W/m^2-K
mass = m.Param(value=4.0/1000.0) # kg
Cp = m.Param(value=0.5*1000.0) # J/kg-K
A = m.Param(value=10.0/100.0**2) # Area not between heaters in m^2
As = m.Param(value=2.0/100.0**2) # Area between heaters in m^2
alpha1 = m.Param(value=0.01) # W / % heater
alpha2 = m.Param(value=0.005) # W / % heater
eps = m.Param(value=0.9) # Emissivity
sigma = m.Const(5.67e-8) # Stefan-Boltzman
# Temperature states as GEKKO variables
T1 = m.Var(value=T0)
T2 = m.Var(value=T0)
# Between two heaters
Q_C12 = m.Intermediate(U*As*(T2-T1)) # Convective
Q_R12 = m.Intermediate(eps*sigma*As*(T2**4-T1**4)) # Radiative
m.Equation(T1.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T1) \
+ eps * sigma * A * (Ta**4 - T1**4) \
+ Q_C12 + Q_R12 \
+ alpha1*Q1))
m.Equation(T2.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T2) \
+ eps * sigma * A * (Ta**4 - T2**4) \
- Q_C12 - Q_R12 \
+ alpha2*Q2))
#simulation mode
m.options.IMODE = 4
#simulation model
m.solve()
#plot results
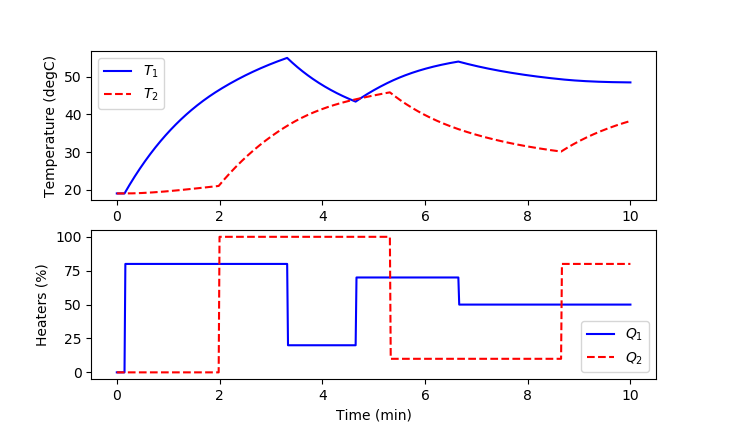
plt.figure(1)
plt.subplot(2,1,1)
plt.plot(m.time/60.0,np.array(T1.value)-273.15,'b-')
plt.plot(m.time/60.0,np.array(T2.value)-273.15,'r--')
plt.legend([r'$T_1$',r'$T_2$'],loc='best')
plt.ylabel('Temperature (degC)')
plt.subplot(2,1,2)
plt.plot(m.time/60.0,np.array(Q1.value),'b-')
plt.plot(m.time/60.0,np.array(Q2.value),'r--')
plt.legend([r'$Q_1$',r'$Q_2$'],loc='best')
plt.ylabel('Heaters (%)')
plt.xlabel('Time (min)')
plt.show()
import matplotlib.pyplot as plt
from gekko import GEKKO
#initialize GEKKO model
m = GEKKO()
#model discretized time
n = 60*10+1 # Number of second time points (10min)
m.time = np.linspace(0,n-1,n) # Time vector
# Parameters
# Percent Heater (0-100%)
Q1d = np.zeros(n)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q1 = m.Param()
Q1.value = Q1d
Q2d = np.zeros(n)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
Q2 = m.Param()
Q2.value = Q2d# Heaters as time-varying inputs
Q1 = m.Param(value=Q1d) # Percent Heater (0-100%)
Q2 = m.Param(value=Q2d) # Percent Heater (0-100%)
T0 = m.Param(value=19.0+273.15) # Initial temperature
Ta = m.Param(value=19.0+273.15) # K
U = m.Param(value=10.0) # W/m^2-K
mass = m.Param(value=4.0/1000.0) # kg
Cp = m.Param(value=0.5*1000.0) # J/kg-K
A = m.Param(value=10.0/100.0**2) # Area not between heaters in m^2
As = m.Param(value=2.0/100.0**2) # Area between heaters in m^2
alpha1 = m.Param(value=0.01) # W / % heater
alpha2 = m.Param(value=0.005) # W / % heater
eps = m.Param(value=0.9) # Emissivity
sigma = m.Const(5.67e-8) # Stefan-Boltzman
# Temperature states as GEKKO variables
T1 = m.Var(value=T0)
T2 = m.Var(value=T0)
# Between two heaters
Q_C12 = m.Intermediate(U*As*(T2-T1)) # Convective
Q_R12 = m.Intermediate(eps*sigma*As*(T2**4-T1**4)) # Radiative
m.Equation(T1.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T1) \
+ eps * sigma * A * (Ta**4 - T1**4) \
+ Q_C12 + Q_R12 \
+ alpha1*Q1))
m.Equation(T2.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T2) \
+ eps * sigma * A * (Ta**4 - T2**4) \
- Q_C12 - Q_R12 \
+ alpha2*Q2))
#simulation mode
m.options.IMODE = 4
#simulation model
m.solve()
#plot results
plt.figure(1)
plt.subplot(2,1,1)
plt.plot(m.time/60.0,np.array(T1.value)-273.15,'b-')
plt.plot(m.time/60.0,np.array(T2.value)-273.15,'r--')
plt.legend([r'$T_1$',r'$T_2$'],loc='best')
plt.ylabel('Temperature (degC)')
plt.subplot(2,1,2)
plt.plot(m.time/60.0,np.array(Q1.value),'b-')
plt.plot(m.time/60.0,np.array(Q2.value),'r--')
plt.legend([r'$Q_1$',r'$Q_2$'],loc='best')
plt.ylabel('Heaters (%)')
plt.xlabel('Time (min)')
plt.show()
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from sklearn.preprocessing import MinMaxScaler
from gekko import GEKKO
import time
# -------------------------------------
# import or generate data
# -------------------------------------
filename = 'tclab_ss_data2.csv'
try:
try:
data = pd.read_csv(filename)
except:
url = 'https://apmonitor.com/do/uploads/Main/tclab_ss_data2.txt'
data = pd.read_csv(url)
except:
# generate training data if data file not available
import tclab
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Heater 1,Heater 2,Temperature 1,Temperature 2\n')
fid.close()
# data collection takes 6 hours = 120 pts * 3 minutes each
npts = 120
for i in range(npts):
# set random heater values
Q1 = np.random.rand()*100
Q2 = np.random.rand()*100
a.Q1(Q1)
a.Q2(Q2)
print('Heater 1: ' + str(Q1) + ' %')
print('Heater 2: ' + str(Q2) + ' %')
# wait 3 minutes
time.sleep(3*60)
# record temperature and heater value
print('Temperature 1: ' + str(a.T1) + ' degC')
print('Temperature 2: ' + str(a.T2) + ' degC')
fid = open(filename,'a')
fid.write(str(Q1)+','+str(Q2)+','+str(a.T1)+','+str(a.T2)+'\n')
fid.close()
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# -------------------------------------
# scale data
# -------------------------------------
s = MinMaxScaler(feature_range=(0,1))
sc_train = s.fit_transform(data)
# partition into inputs and outputs
xs = sc_train[:,0:2] # 2 heaters
ys = sc_train[:,2:4] # 2 temperatures
# -------------------------------------
# build neural network
# -------------------------------------
nin = 2 # inputs
n1 = 2 # hidden layer 1 (linear)
n2 = 2 # hidden layer 2 (nonlinear)
n3 = 2 # hidden layer 3 (linear)
nout = 2 # outputs
# Initialize gekko models
train = GEKKO()
dyn = GEKKO()
model = [train,dyn]
for m in model:
# use APOPT solver
m.options.SOLVER = 1
# input(s)
m.inpt = [m.Param() for i in range(nin)]
# layer 1 (linear)
m.w1 = m.Array(m.FV, (nout,nin,n1))
m.l1 = [[m.Intermediate(sum([m.w1[k,j,i]*m.inpt[j] \
for j in range(nin)])) for i in range(n1)] \
for k in range(nout)]
# layer 2 (tanh)
m.w2 = m.Array(m.FV, (nout,n1,n2))
m.l2 = [[m.Intermediate(sum([m.tanh(m.w2[k,j,i]*m.l1[k][j]) \
for j in range(n1)])) for i in range(n2)] \
for k in range(nout)]
# layer 3 (linear)
m.w3 = m.Array(m.FV, (nout,n2,n3))
m.l3 = [[m.Intermediate(sum([m.w3[k,j,i]*m.l2[k][j] \
for j in range(n2)])) for i in range(n3)] \
for k in range(nout)]
# outputs
m.outpt = [m.CV() for i in range(nout)]
m.Equations([m.outpt[k]==sum([m.l3[k][i] for i in range(n3)]) \
for k in range(nout)])
# flatten matrices
m.w1 = m.w1.flatten()
m.w2 = m.w2.flatten()
m.w3 = m.w3.flatten()
# -------------------------------------
# fit parameter weights
# -------------------------------------
m = train
for i in range(nin):
m.inpt[i].value=xs[:,i]
for i in range(nout):
m.outpt[i].value = ys[:,i]
m.outpt[i].FSTATUS = 1
for i in range(len(m.w1)):
m.w1[i].FSTATUS=1
m.w1[i].STATUS=1
m.w1[i].MEAS=1.0
for i in range(len(m.w2)):
m.w2[i].STATUS=1
m.w2[i].FSTATUS=1
m.w2[i].MEAS=0.5
for i in range(len(m.w3)):
m.w3[i].FSTATUS=1
m.w3[i].STATUS=1
m.w3[i].MEAS=1.0
m.options.IMODE = 2
m.options.EV_TYPE = 2
# solve for weights to minimize loss (objective)
m.solve(disp=True)
# -------------------------------------
# generate dynamic predictions
# -------------------------------------
m = dyn
tf = 600
m.time = np.linspace(0,tf,tf+1)
# load neural network parameters
for i in range(len(m.w1)):
m.w1[i].MEAS=train.w1[i].NEWVAL
m.w1[i].FSTATUS = 1
for i in range(len(m.w2)):
m.w2[i].MEAS=train.w2[i].NEWVAL
m.w2[i].FSTATUS = 1
for i in range(len(m.w3)):
m.w3[i].MEAS=train.w3[i].NEWVAL
m.w3[i].FSTATUS = 1
# step tests
Q1d = np.zeros(tf+1)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q1 = m.Param()
Q1.value = Q1d
Q2d = np.zeros(tf+1)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
Q2 = m.Param()
Q2.value = Q2d
# scaled inputs
m.inpt[0].value = Q1d * s.scale_[0] + s.min_[0]
m.inpt[1].value = Q2d * s.scale_[1] + s.min_[1]
# define Temperature output
Q0 = 0 # initial heater
T0 = 19 # ambient temperature
# scaled steady state ouput
T1_ss = m.Var(value=T0)
T2_ss = m.Var(value=T0)
m.Equation(T1_ss == (m.outpt[0]-s.min_[2])/s.scale_[2])
m.Equation(T2_ss == (m.outpt[1]-s.min_[3])/s.scale_[3])
# dynamic prediction
T1 = m.Var(value=T0)
T2 = m.Var(value=T0)
# time constant
tau = m.Param(value=120) # determine in a later exercise
# additional model equation for dynamics
m.Equation(tau*T1.dt()==-(T1-T0)+(T1_ss-T0))
m.Equation(tau*T2.dt()==-(T2-T0)+(T2_ss-T0))
# solve dynamic simulation
m.options.IMODE=4
m.solve()
# generate step test data on Arduino
# -------------------------------------
# import or generate data
# -------------------------------------
filename = 'tclab_dyn_data2.csv'
try:
try:
data = pd.read_csv(filename)
except:
url = 'https://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
except:
# generate training data if data file not available
import tclab
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Time,H1,H2,T1,T2\n')
fid.close()
# check for cool down
i = 0
while i<=10:
i += 1 # upper limit on wait time
T1m = a.T1
T2m = a.T2
print('T1: ' + str(a.T1) + ' T2: ' + str(a.T2))
print('Sleep 30 sec')
time.sleep(30)
if (a.T1<30 and a.T2<30 and a.T1>=T1m-0.2 and a.T2>=T2m-0.2):
break # continue when conditions met
else:
print('Not at ambient temperature')
# run step test (10 min)
for i in range(tf+1):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + \
' H1: ' + str(Q1d[i]) + \
' H2: ' + str(Q2d[i]) + \
' T1: ' + str(a.T1) + \
' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+','+str(Q1d[i])+','+str(Q2d[i])+',' \
+str(a.T1)+','+str(a.T2)+'\n')
fid.close()
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
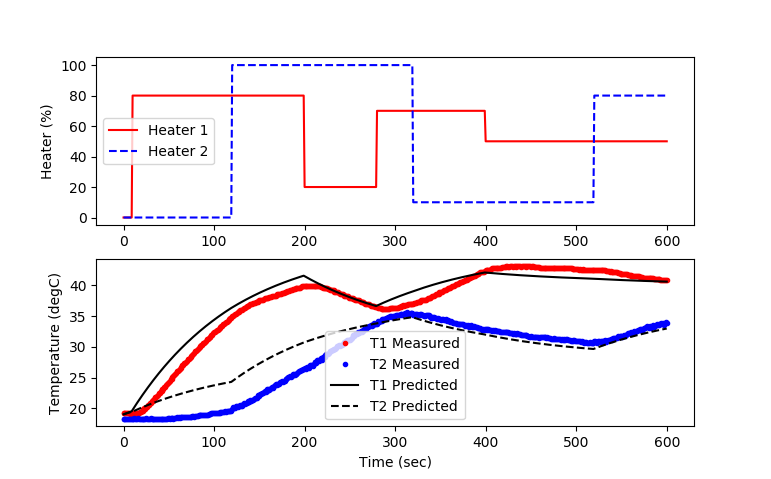
# plot prediction and measurement
plt.figure()
plt.subplot(2,1,1)
plt.plot(m.time,Q1.value,'r-',label='Heater 1')
plt.plot(m.time,Q2.value,'b--',label='Heater 2')
plt.ylabel('Heater (%)')
plt.legend(loc='best')
plt.subplot(2,1,2)
plt.plot(data['Time'],data['T1'],'r.',label='T1 Measured')
plt.plot(data['Time'],data['T2'],'b.',label='T2 Measured')
plt.plot(m.time,T1.value,'k-',label='T1 Predicted')
plt.plot(m.time,T2.value,'k--',label='T2 Predicted')
plt.ylabel('Temperature (degC)')
plt.legend(loc='best')
plt.xlabel('Time (sec)')
plt.savefig('tclab_dyn_pred.png')
plt.show()
import pandas as pd
import matplotlib.pyplot as plt
from sklearn.preprocessing import MinMaxScaler
from gekko import GEKKO
import time
# -------------------------------------
# import or generate data
# -------------------------------------
filename = 'tclab_ss_data2.csv'
try:
try:
data = pd.read_csv(filename)
except:
url = 'https://apmonitor.com/do/uploads/Main/tclab_ss_data2.txt'
data = pd.read_csv(url)
except:
# generate training data if data file not available
import tclab
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Heater 1,Heater 2,Temperature 1,Temperature 2\n')
fid.close()
# data collection takes 6 hours = 120 pts * 3 minutes each
npts = 120
for i in range(npts):
# set random heater values
Q1 = np.random.rand()*100
Q2 = np.random.rand()*100
a.Q1(Q1)
a.Q2(Q2)
print('Heater 1: ' + str(Q1) + ' %')
print('Heater 2: ' + str(Q2) + ' %')
# wait 3 minutes
time.sleep(3*60)
# record temperature and heater value
print('Temperature 1: ' + str(a.T1) + ' degC')
print('Temperature 2: ' + str(a.T2) + ' degC')
fid = open(filename,'a')
fid.write(str(Q1)+','+str(Q2)+','+str(a.T1)+','+str(a.T2)+'\n')
fid.close()
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# -------------------------------------
# scale data
# -------------------------------------
s = MinMaxScaler(feature_range=(0,1))
sc_train = s.fit_transform(data)
# partition into inputs and outputs
xs = sc_train[:,0:2] # 2 heaters
ys = sc_train[:,2:4] # 2 temperatures
# -------------------------------------
# build neural network
# -------------------------------------
nin = 2 # inputs
n1 = 2 # hidden layer 1 (linear)
n2 = 2 # hidden layer 2 (nonlinear)
n3 = 2 # hidden layer 3 (linear)
nout = 2 # outputs
# Initialize gekko models
train = GEKKO()
dyn = GEKKO()
model = [train,dyn]
for m in model:
# use APOPT solver
m.options.SOLVER = 1
# input(s)
m.inpt = [m.Param() for i in range(nin)]
# layer 1 (linear)
m.w1 = m.Array(m.FV, (nout,nin,n1))
m.l1 = [[m.Intermediate(sum([m.w1[k,j,i]*m.inpt[j] \
for j in range(nin)])) for i in range(n1)] \
for k in range(nout)]
# layer 2 (tanh)
m.w2 = m.Array(m.FV, (nout,n1,n2))
m.l2 = [[m.Intermediate(sum([m.tanh(m.w2[k,j,i]*m.l1[k][j]) \
for j in range(n1)])) for i in range(n2)] \
for k in range(nout)]
# layer 3 (linear)
m.w3 = m.Array(m.FV, (nout,n2,n3))
m.l3 = [[m.Intermediate(sum([m.w3[k,j,i]*m.l2[k][j] \
for j in range(n2)])) for i in range(n3)] \
for k in range(nout)]
# outputs
m.outpt = [m.CV() for i in range(nout)]
m.Equations([m.outpt[k]==sum([m.l3[k][i] for i in range(n3)]) \
for k in range(nout)])
# flatten matrices
m.w1 = m.w1.flatten()
m.w2 = m.w2.flatten()
m.w3 = m.w3.flatten()
# -------------------------------------
# fit parameter weights
# -------------------------------------
m = train
for i in range(nin):
m.inpt[i].value=xs[:,i]
for i in range(nout):
m.outpt[i].value = ys[:,i]
m.outpt[i].FSTATUS = 1
for i in range(len(m.w1)):
m.w1[i].FSTATUS=1
m.w1[i].STATUS=1
m.w1[i].MEAS=1.0
for i in range(len(m.w2)):
m.w2[i].STATUS=1
m.w2[i].FSTATUS=1
m.w2[i].MEAS=0.5
for i in range(len(m.w3)):
m.w3[i].FSTATUS=1
m.w3[i].STATUS=1
m.w3[i].MEAS=1.0
m.options.IMODE = 2
m.options.EV_TYPE = 2
# solve for weights to minimize loss (objective)
m.solve(disp=True)
# -------------------------------------
# generate dynamic predictions
# -------------------------------------
m = dyn
tf = 600
m.time = np.linspace(0,tf,tf+1)
# load neural network parameters
for i in range(len(m.w1)):
m.w1[i].MEAS=train.w1[i].NEWVAL
m.w1[i].FSTATUS = 1
for i in range(len(m.w2)):
m.w2[i].MEAS=train.w2[i].NEWVAL
m.w2[i].FSTATUS = 1
for i in range(len(m.w3)):
m.w3[i].MEAS=train.w3[i].NEWVAL
m.w3[i].FSTATUS = 1
# step tests
Q1d = np.zeros(tf+1)
Q1d[10:200] = 80
Q1d[200:280] = 20
Q1d[280:400] = 70
Q1d[400:] = 50
Q1 = m.Param()
Q1.value = Q1d
Q2d = np.zeros(tf+1)
Q2d[120:320] = 100
Q2d[320:520] = 10
Q2d[520:] = 80
Q2 = m.Param()
Q2.value = Q2d
# scaled inputs
m.inpt[0].value = Q1d * s.scale_[0] + s.min_[0]
m.inpt[1].value = Q2d * s.scale_[1] + s.min_[1]
# define Temperature output
Q0 = 0 # initial heater
T0 = 19 # ambient temperature
# scaled steady state ouput
T1_ss = m.Var(value=T0)
T2_ss = m.Var(value=T0)
m.Equation(T1_ss == (m.outpt[0]-s.min_[2])/s.scale_[2])
m.Equation(T2_ss == (m.outpt[1]-s.min_[3])/s.scale_[3])
# dynamic prediction
T1 = m.Var(value=T0)
T2 = m.Var(value=T0)
# time constant
tau = m.Param(value=120) # determine in a later exercise
# additional model equation for dynamics
m.Equation(tau*T1.dt()==-(T1-T0)+(T1_ss-T0))
m.Equation(tau*T2.dt()==-(T2-T0)+(T2_ss-T0))
# solve dynamic simulation
m.options.IMODE=4
m.solve()
# generate step test data on Arduino
# -------------------------------------
# import or generate data
# -------------------------------------
filename = 'tclab_dyn_data2.csv'
try:
try:
data = pd.read_csv(filename)
except:
url = 'https://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
except:
# generate training data if data file not available
import tclab
# Connect to Arduino
a = tclab.TCLab()
fid = open(filename,'w')
fid.write('Time,H1,H2,T1,T2\n')
fid.close()
# check for cool down
i = 0
while i<=10:
i += 1 # upper limit on wait time
T1m = a.T1
T2m = a.T2
print('T1: ' + str(a.T1) + ' T2: ' + str(a.T2))
print('Sleep 30 sec')
time.sleep(30)
if (a.T1<30 and a.T2<30 and a.T1>=T1m-0.2 and a.T2>=T2m-0.2):
break # continue when conditions met
else:
print('Not at ambient temperature')
# run step test (10 min)
for i in range(tf+1):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + \
' H1: ' + str(Q1d[i]) + \
' H2: ' + str(Q2d[i]) + \
' T1: ' + str(a.T1) + \
' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+','+str(Q1d[i])+','+str(Q2d[i])+',' \
+str(a.T1)+','+str(a.T2)+'\n')
fid.close()
# close connection to Arduino
a.close()
# read data file
data = pd.read_csv(filename)
# plot prediction and measurement
plt.figure()
plt.subplot(2,1,1)
plt.plot(m.time,Q1.value,'r-',label='Heater 1')
plt.plot(m.time,Q2.value,'b--',label='Heater 2')
plt.ylabel('Heater (%)')
plt.legend(loc='best')
plt.subplot(2,1,2)
plt.plot(data['Time'],data['T1'],'r.',label='T1 Measured')
plt.plot(data['Time'],data['T2'],'b.',label='T2 Measured')
plt.plot(m.time,T1.value,'k-',label='T1 Predicted')
plt.plot(m.time,T2.value,'k--',label='T2 Predicted')
plt.ylabel('Temperature (degC)')
plt.legend(loc='best')
plt.xlabel('Time (sec)')
plt.savefig('tclab_dyn_pred.png')
plt.show()
See also: