TCLab E - Hybrid Model Estimation
Main.TCLabE History
Hide minor edits - Show changes to markup
linewidth=3,label=r'$T_1$ sensor')
lw=3,label=r'$T_1$ sensor')
linewidth=3,label=r'$T_2$ sensor')
lw=3,label=r'$T_2$ sensor')
linewidth=3,label=r'$Q_1$')
lw=3,label=r'$Q_1$')
linewidth=3,label=r'$Q_2$')
lw=3,label=r'$Q_2$')
Virtual TCLab on Google Colab
Note: Switch to make_mp4 = True to make an MP4 movie animation. This requires imageio and ffmpeg (install available through Python). It creates a folder named figures in your run directory. You can delete this folder after the run is complete.
- Make an MP4 animation?
make_mp4 = False if make_mp4:
import imageio # required to make animation
import os
try:
os.mkdir('./figures')
except:
pass
- Use remote=False for local solve (Windows, Linux, ARM)
- remote=True for remote solve (All platforms)
- change to remote=True for MacOS
tau = m.FV(value=20,name='tau')
tau = m.FV(value=5,name='tau')
tau.LOWER = 15 tau.UPPER = 25
tau.LOWER = 4 tau.UPPER = 8
m.solve()
m.solve(disp=True)
if make_mp4:
filename='./figures/plot_str(i+10000).png'
plt.savefig(filename)
# generate mp4 from png figures in batches of 350
if make_mp4:
images = []
iset = 0
for i in range(1,n):
filename='./figures/plot_str(i+10000).png'
images.append(imageio.imread(filename))
if ((i+1)%350)==0:
imageio.mimsave('results_str(iset).mp4', images)
iset += 1
images = []
if images!=[]:
imageio.mimsave('results_str(iset).mp4', images)
(:toggle hide gekko_labCm button show="Lab E: Python GEKKO Moving Horizon Estimation":) (:div id=gekko_labCm:)
(:toggle hide gekko_labEm button show="Lab E: Python GEKKO Moving Horizon Estimation":) (:div id=gekko_labEm:)
import numpy as np import time import matplotlib.pyplot as plt import random
- get gekko package with:
- pip install gekko
from gekko import GEKKO
- get tclab package with:
- pip install tclab
from tclab import TCLab
- Connect to Arduino
a = TCLab()
- Final time
tf = 10 # min
- number of data points (1 pt every 3 seconds)
n = tf * 20 + 1
- Configure heater levels
- Percent Heater (0-100%)
Q1s = np.zeros(n) Q2s = np.zeros(n)
- Heater random steps every 50 sec
- Alternate steps by Q1 and Q2
Q1s[3:] = 100.0 Q1s[50:] = 0.0 Q1s[100:] = 80.0
Q2s[25:] = 60.0 Q2s[75:] = 100.0 Q2s[125:] = 25.0
- rapid, random changes every 5 cycles between 50 and 100
for i in range(130,180):
if i%10==0:
Q1s[i:i+10] = random.random() * 100.0
if (i+5)%10==0:
Q2s[i:i+10] = random.random() * 100.0
- Record initial temperatures (degC)
T1m = a.T1 * np.ones(n) T2m = a.T2 * np.ones(n)
- Store MHE values for plots
Tmhe1 = T1m[0] * np.ones(n) Tmhe2 = T2m[0] * np.ones(n) Umhe = 10.0 * np.ones(n) taumhe = 5.0 * np.ones(n) amhe1 = 0.01 * np.ones(n) amhe2 = 0.0075 * np.ones(n)
- Initialize Model as Estimator
- Use remote=False for local solve (Windows, Linux, ARM)
- remote=True for remote solve (All platforms)
m = GEKKO(name='tclab-mhe',remote=False)
- 60 second time horizon, 20 steps
m.time = np.linspace(0,60,21)
- Parameters to Estimate
U = m.FV(value=10,name='u') U.STATUS = 0 # don't estimate initially U.FSTATUS = 0 # no measurements U.DMAX = 1 U.LOWER = 5 U.UPPER = 15
tau = m.FV(value=20,name='tau') tau.STATUS = 0 # don't estimate initially tau.FSTATUS = 0 # no measurements tau.DMAX = 1 tau.LOWER = 15 tau.UPPER = 25
alpha1 = m.FV(value=0.01,name='a1') # W / % heater alpha1.STATUS = 0 # don't estimate initially alpha1.FSTATUS = 0 # no measurements alpha1.DMAX = 0.001 alpha1.LOWER = 0.003 alpha1.UPPER = 0.03
alpha2 = m.FV(value=0.0075,name='a2') # W / % heater alpha2.STATUS = 0 # don't estimate initially alpha2.FSTATUS = 0 # no measurements alpha2.DMAX = 0.001 alpha2.LOWER = 0.002 alpha2.UPPER = 0.02
- Measured inputs
Q1 = m.MV(value=0,name='q1') Q1.STATUS = 0 # don't estimate Q1.FSTATUS = 1 # receive measurement
Q2 = m.MV(value=0,name='q2') Q2.STATUS = 0 # don't estimate Q2.FSTATUS = 1 # receive measurement
- State variables
TH1 = m.SV(value=T1m[0],name='th1') TH2 = m.SV(value=T2m[0],name='th2')
- Measurements for model alignment
TC1 = m.CV(value=T1m[0],name='tc1') TC1.STATUS = 1 # minimize error between simulation and measurement TC1.FSTATUS = 1 # receive measurement TC1.MEAS_GAP = 0.1 # measurement deadband gap TC1.LOWER = 0 TC1.UPPER = 200
TC2 = m.CV(value=T2m[0],name='tc2') TC2.STATUS = 1 # minimize error between simulation and measurement TC2.FSTATUS = 1 # receive measurement TC2.MEAS_GAP = 0.1 # measurement deadband gap TC2.LOWER = 0 TC2.UPPER = 200
Ta = m.Param(value=23.0+273.15) # K mass = m.Param(value=4.0/1000.0) # kg Cp = m.Param(value=0.5*1000.0) # J/kg-K A = m.Param(value=10.0/100.0**2) # Area not between heaters in m^2 As = m.Param(value=2.0/100.0**2) # Area between heaters in m^2 eps = m.Param(value=0.9) # Emissivity sigma = m.Const(5.67e-8) # Stefan-Boltzmann
- Heater temperatures
T1 = m.Intermediate(TH1+273.15) T2 = m.Intermediate(TH2+273.15)
- Heat transfer between two heaters
Q_C12 = m.Intermediate(U*As*(T2-T1)) # Convective Q_R12 = m.Intermediate(eps*sigma*As*(T2**4-T1**4)) # Radiative
- Semi-fundamental correlations (energy balances)
m.Equation(TH1.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T1) + eps * sigma * A * (Ta**4 - T1**4) + Q_C12 + Q_R12 + alpha1*Q1))
m.Equation(TH2.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T2) + eps * sigma * A * (Ta**4 - T2**4) - Q_C12 - Q_R12 + alpha2*Q2))
- Empirical correlations (lag equations to emulate conduction)
m.Equation(tau * TC1.dt() == -TC1 + TH1) m.Equation(tau * TC2.dt() == -TC2 + TH2)
- Global Options
m.options.IMODE = 5 # MHE m.options.EV_TYPE = 2 # Objective type m.options.NODES = 3 # Collocation nodes m.options.SOLVER = 3 # IPOPT m.options.COLDSTART = 1 # COLDSTART on first cycle
- Create plot
plt.figure(figsize=(10,7)) plt.ion() plt.show()
- Main Loop
start_time = time.time() prev_time = start_time tm = np.zeros(n)
try:
for i in range(1,n):
# Sleep time
sleep_max = 3.0
sleep = sleep_max - (time.time() - prev_time)
if sleep>=0.01:
time.sleep(sleep-0.01)
else:
time.sleep(0.01)
# Record time and change in time
t = time.time()
dt = t - prev_time
prev_time = t
tm[i] = t - start_time
# Read temperatures in Celsius
T1m[i] = a.T1
T2m[i] = a.T2
# Insert measurements
TC1.MEAS = T1m[i]
TC2.MEAS = T2m[i]
Q1.MEAS = Q1s[i-1]
Q2.MEAS = Q2s[i-1]
# Start estimating U after 10 cycles (20 sec)
if i==10:
U.STATUS = 1
tau.STATUS = 1
alpha1.STATUS = 1
alpha2.STATUS = 1
# Predict Parameters and Temperatures with MHE
m.solve()
if m.options.APPSTATUS == 1:
# Retrieve new values
Tmhe1[i] = TC1.MODEL
Tmhe2[i] = TC2.MODEL
Umhe[i] = U.NEWVAL
taumhe[i] = tau.NEWVAL
amhe1[i] = alpha1.NEWVAL
amhe2[i] = alpha2.NEWVAL
else:
# Solution failed, copy prior solution
Tmhe1[i] = Tmhe1[i-1]
Tmhe2[i] = Tmhe1[i-1]
Umhe[i] = Umhe[i-1]
taumhe[i] = taumhe[i-1]
amhe1[i] = amhe1[i-1]
amhe2[i] = amhe2[i-1]
# Write new heater values (0-100)
a.Q1(Q1s[i])
a.Q2(Q2s[i])
# Plot
plt.clf()
ax=plt.subplot(3,1,1)
ax.grid()
plt.plot(tm[0:i],T1m[0:i],'ro',label=r'$T_1$ measured')
plt.plot(tm[0:i],Tmhe1[0:i],'k-',label=r'$T_1$ MHE')
plt.plot(tm[0:i],T2m[0:i],'bx',label=r'$T_2$ measured')
plt.plot(tm[0:i],Tmhe2[0:i],'k--',label=r'$T_2$ MHE')
plt.ylabel('Temperature (degC)')
plt.legend(loc=2)
ax=plt.subplot(3,1,2)
ax.grid()
plt.plot(tm[0:i],Umhe[0:i],'k-',label='Heat Transfer Coeff')
plt.plot(tm[0:i],taumhe[0:i],'g:',label='Time Constant')
plt.plot(tm[0:i],amhe1[0:i]*1000,'r--',label=r'$\alpha_1$x1000')
plt.plot(tm[0:i],amhe2[0:i]*1000,'b--',label=r'$\alpha_2$x1000')
plt.ylabel('Parameters')
plt.legend(loc='best')
ax=plt.subplot(3,1,3)
ax.grid()
plt.plot(tm[0:i],Q1s[0:i],'r-',label=r'$Q_1$')
plt.plot(tm[0:i],Q2s[0:i],'b:',label=r'$Q_2$')
plt.ylabel('Heaters')
plt.xlabel('Time (sec)')
plt.legend(loc='best')
plt.draw()
plt.pause(0.05)
# Turn off heaters
a.Q1(0)
a.Q2(0)
# Save figure
plt.savefig('tclab_mhe.png')
- Allow user to end loop with Ctrl-C
except KeyboardInterrupt:
# Disconnect from Arduino
a.Q1(0)
a.Q2(0)
print('Shutting down')
a.close()
plt.savefig('tclab_mhe.png')
- Make sure serial connection still closes when there's an error
except:
# Disconnect from Arduino
a.Q1(0)
a.Q2(0)
print('Error: Shutting down')
a.close()
plt.savefig('tclab_mhe.png')
raise
import numpy as np import matplotlib.pyplot as plt import pandas as pd from gekko import GEKKO
- Import or generate data
filename = 'tclab_dyn_data2.csv' try:
data = pd.read_csv(filename)
except:
url = 'https://apmonitor.com/do/uploads/Main/tclab_dyn_data2.txt'
data = pd.read_csv(url)
- Create GEKKO Model
m = GEKKO() m.time = data['Time'].values
- Parameters to Estimate
U = m.FV(value=10,lb=1,ub=20) tau = m.FV(value=20,lb=15,ub=25) alpha1 = m.FV(value=0.01,lb=0.003,ub=0.03) # W / % heater alpha2 = m.FV(value=0.005,lb=0.002,ub=0.02) # W / % heater
- STATUS=1 allows solver to adjust parameter
U.STATUS = 1 tau.STATUS = 1 alpha1.STATUS = 1 alpha2.STATUS = 1
- Measured inputs
Q1 = m.MV(value=data['H1'].values) Q2 = m.MV(value=data['H2'].values)
- State variables
TH1 = m.SV(value=data['T1'].values) TH2 = m.SV(value=data['T2'].values)
- Measurements for model alignment
TC1 = m.CV(value=data['T1'].values,lb=0,ub=200) TC1.FSTATUS = 1 # minimize fstatus * (meas-pred)^2
TC2 = m.CV(value=data['T2'].values,lb=0,ub=200) TC2.FSTATUS = 1 # minimize fstatus * (meas-pred)^2
Ta = m.Param(value=19.0+273.15) # K mass = m.Param(value=4.0/1000.0) # kg Cp = m.Param(value=0.5*1000.0) # J/kg-K A = m.Param(value=10.0/100.0**2) # Area not between heaters in m^2 As = m.Param(value=2.0/100.0**2) # Area between heaters in m^2 eps = m.Param(value=0.9) # Emissivity sigma = m.Const(5.67e-8) # Stefan-Boltzmann
- Heater temperatures in Kelvin
T1 = m.Intermediate(TH1+273.15) T2 = m.Intermediate(TH2+273.15)
- Heat transfer between two heaters
Q_C12 = m.Intermediate(U*As*(T2-T1)) # Convective Q_R12 = m.Intermediate(eps*sigma*As*(T2**4-T1**4)) # Radiative
- Semi-fundamental correlations (energy balances)
m.Equation(TH1.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T1) + eps * sigma * A * (Ta**4 - T1**4) + Q_C12 + Q_R12 + alpha1*Q1))
m.Equation(TH2.dt() == (1.0/(mass*Cp))*(U*A*(Ta-T2) + eps * sigma * A * (Ta**4 - T2**4) - Q_C12 - Q_R12 + alpha2*Q2))
- Empirical correlations (lag equations to emulate conduction)
m.Equation(tau * TC1.dt() == -TC1 + TH1) m.Equation(tau * TC2.dt() == -TC2 + TH2)
- Options
m.options.IMODE = 5 # MHE m.options.EV_TYPE = 2 # Objective type m.options.NODES = 2 # Collocation nodes m.options.SOLVER = 3 # IPOPT
- Solve
m.solve(disp=True)
- Parameter values
print('U : ' + str(U.value[0])) print('tau : ' + str(tau.value[0])) print('alpha1: ' + str(alpha1.value[0])) print('alpha2: ' + str(alpha2.value[0]))
- Create plot
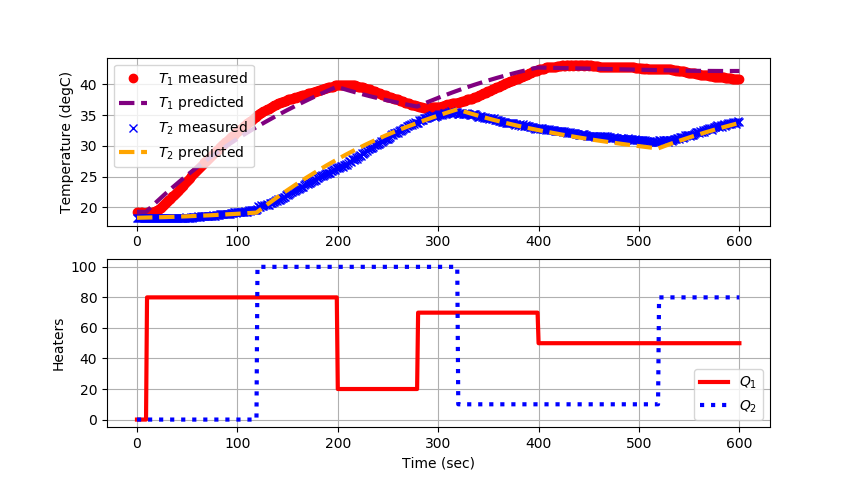
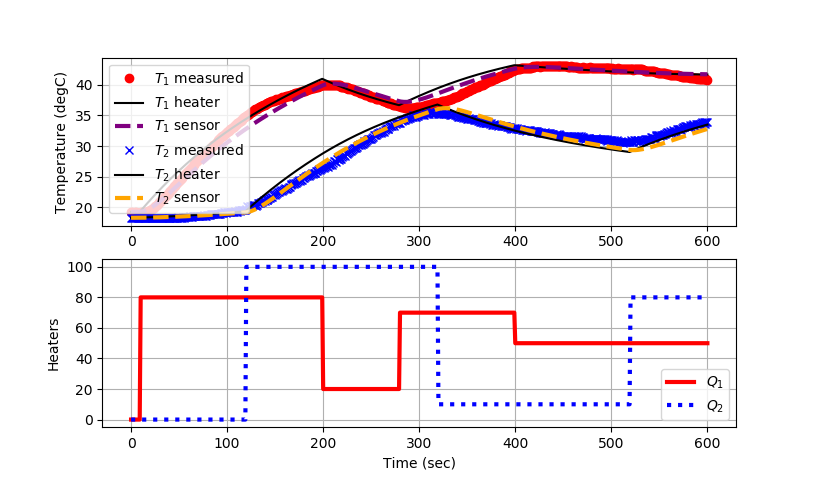
plt.figure() ax=plt.subplot(2,1,1) ax.grid() plt.plot(data['Time'],data['T1'],'ro',label=r'$T_1$ measured') plt.plot(m.time,TH1.value,'k-',label=r'$T_1$ heater') plt.plot(m.time,TC1.value,color='purple',linestyle=, linewidth=3,label=r'$T_1$ sensor') plt.plot(data['Time'],data['T2'],'bx',label=r'$T_2$ measured') plt.plot(m.time,TH2.value,'k-',label=r'$T_2$ heater') plt.plot(m.time,TC2.value,color='orange',linestyle=, linewidth=3,label=r'$T_2$ sensor') plt.ylabel('Temperature (degC)') plt.legend(loc=2) ax=plt.subplot(2,1,2) ax.grid() plt.plot(data['Time'],data['H1'],'r-', linewidth=3,label=r'$Q_1$') plt.plot(data['Time'],data['H2'],'b:', linewidth=3,label=r'$Q_2$') plt.ylabel('Heaters') plt.xlabel('Time (sec)') plt.legend(loc='best') plt.show()
The TCLab is a hands-on application of machine learning and advanced temperature control with two heaters and two temperature sensors. The labs reinforce principles of model development, estimation, and advanced control methods. This is the fifth exercise and it involves estimating parameters in a multi-variate energy balance model with added empirical elements. The predictions are aligned to the measured values through an optimizer that adjusts the parameters to minimize a sum of squared error or sum of absolute values objective. This lab builds upon the TCLab C by using the estimation of parameters in an energy balance but also adding additional equations that give a 2nd order response. The 2nd order response comes from splitting the finite element model of the heaters and temperature sensors.
The TCLab is a hands-on application of machine learning and advanced temperature control with two heaters and two temperature sensors. The labs reinforce principles of model development, estimation, and advanced control methods. This is the fifth exercise and it involves estimating parameters in a multi-variate energy balance model with added empirical elements. The predictions are aligned to the measured values through an optimizer that adjusts the parameters to minimize a sum of squared error or sum of absolute values objective. This lab builds upon the TCLab C by using the estimation of parameters in an energy balance but also adding additional equations that give a 2nd order response. The 2nd order response comes from splitting the finite element model of the heaters and temperature sensors. This creates a total of 4 differential equations with parameters that are adjusted to minimize the difference between the predicted and measured temperatures.
<source src="/do/uploads/Main/tclab_mhe.mp4" type="video/mp4">
<source src="/do/uploads/Main/tclab_mhe_hybrid.mp4" type="video/mp4">
(:toggle hide gekko_labCm button show="Lab C: Python GEKKO Moving Horizon Estimation":)
(:toggle hide gekko_labCm button show="Lab E: Python GEKKO Moving Horizon Estimation":)
(:title TCLab E - Hybrid Model Estimation:) (:keywords Arduino, Hybrid, Parameter, Regression, temperature, control, process control, course:) (:description Regression of Parameters in Multivariate (MIMO) Energy Balance with Empirical Elements using Arduino Data from TCLab:)
The TCLab is a hands-on application of machine learning and advanced temperature control with two heaters and two temperature sensors. The labs reinforce principles of model development, estimation, and advanced control methods. This is the fifth exercise and it involves estimating parameters in a multi-variate energy balance model with added empirical elements. The predictions are aligned to the measured values through an optimizer that adjusts the parameters to minimize a sum of squared error or sum of absolute values objective. This lab builds upon the TCLab C by using the estimation of parameters in an energy balance but also adding additional equations that give a 2nd order response. The 2nd order response comes from splitting the finite element model of the heaters and temperature sensors.
Lab Problem Statement
Data and Solutions
- Solution in Python and MATLAB
(:html:) <iframe width="560" height="315" src="https://www.youtube.com/embed/eEjjkHb1e_E" frameborder="0" allow="accelerometer; autoplay; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe> (:htmlend:)
(:toggle hide gekko_labEd button show="Lab E: Python TCLab Generate Step Data":) (:div id=gekko_labEd:) (:source lang=python:) import numpy as np import pandas as pd import tclab import time import matplotlib.pyplot as plt
- generate step test data on Arduino
filename = 'tclab_dyn_data2.csv'
- heater steps
Q1d = np.zeros(601) Q1d[10:200] = 80 Q1d[200:280] = 20 Q1d[280:400] = 70 Q1d[400:] = 50
Q2d = np.zeros(601) Q2d[120:320] = 100 Q2d[320:520] = 10 Q2d[520:] = 80
- Connect to Arduino
a = tclab.TCLab() fid = open(filename,'w') fid.write('Time,H1,H2,T1,T2\n') fid.close()
- run step test (10 min)
for i in range(601):
# set heater values
a.Q1(Q1d[i])
a.Q2(Q2d[i])
print('Time: ' + str(i) + ' H1: ' + str(Q1d[i]) + ' H2: ' + str(Q2d[i]) + ' T1: ' + str(a.T1) + ' T2: ' + str(a.T2))
# wait 1 second
time.sleep(1)
fid = open(filename,'a')
fid.write(str(i)+',str(Q1d[i]),str(Q2d[i]),' +str(a.T1)+',str(a.T2)\n')
- close connection to Arduino
a.close()
- read data file
data = pd.read_csv(filename)
- plot measurements
plt.figure() plt.subplot(2,1,1) plt.plot(data['Time'],data['H1'],'r-',label='Heater 1') plt.plot(data['Time'],data['H2'],'b--',label='Heater 2') plt.ylabel('Heater (%)') plt.legend(loc='best') plt.subplot(2,1,2) plt.plot(data['Time'],data['T1'],'r.',label='Temperature 1') plt.plot(data['Time'],data['T2'],'b.',label='Temperature 2') plt.ylabel('Temperature (degC)') plt.legend(loc='best') plt.xlabel('Time (sec)') plt.savefig('tclab_dyn_meas2.png')
plt.show() (:sourceend:) (:divend:)
(:toggle hide gekko_labEf button show="Lab E: Python GEKKO Parameter Estimation":) (:div id=gekko_labEf:) (:source lang=python:) (:sourceend:) (:divend:)
(:html:) <video width="550" controls autoplay loop>
<source src="/do/uploads/Main/tclab_mhe.mp4" type="video/mp4"> Your browser does not support the video tag.
</video> (:htmlend:)
(:toggle hide gekko_labCm button show="Lab C: Python GEKKO Moving Horizon Estimation":) (:div id=gekko_labCm:) (:source lang=python:) (:sourceend:) (:divend:)
See also:
Advanced Control Lab Overview
GEKKO Documentation
TCLab Documentation
TCLab Files on GitHub
Basic (PID) Control Lab
(:html:) <style> .button {
border-radius: 4px; background-color: #0000ff; border: none; color: #FFFFFF; text-align: center; font-size: 28px; padding: 20px; width: 300px; transition: all 0.5s; cursor: pointer; margin: 5px;
}
.button span {
cursor: pointer; display: inline-block; position: relative; transition: 0.5s;
}
.button span:after {
content: '\00bb'; position: absolute; opacity: 0; top: 0; right: -20px; transition: 0.5s;
}
.button:hover span {
padding-right: 25px;
}
.button:hover span:after {
opacity: 1; right: 0;
} </style> (:htmlend:)